在这个视频中,我们将讨论什么样的控制算法,你需要控制一个无刷直流电机。我们将探索这种控制算法的不同信号的行为,并讨论感应反激的概念。
在之前的视频中,我们介绍了一个无刷直流电机,它有三个线圈绕组在定子和一个单极对在转子。我们还讨论了如何通过六步换向或梯形控制在无刷直流电机中产生运动,其中正确的相位每60度换向,以使电机连续旋转。
在这里,我们有一个直流电压源,为三相逆变器提供恒定的电压,将直流电源转换为三相电流,以激励不同的线圈对。当施加电压恒定时,由于电压与速度的比例关系,电机以恒定的速度旋转。但是如果我们想要以不同的速度控制电机,那么我们需要建立一个控制器来调整施加电压的大小。让我们首先构建这个控制器的图。
这是我们的汽车。为了控制它,我们首先需要使用霍尔效应传感器等传感器来测量它的角位置和速度。注意,霍尔传感器不能提供转子在扇区内的精确位置信息。但它允许检测转子何时从一个扇区过渡到另一个扇区。实际上,扇区信息是我们需要知道的,来决定什么时候换向电机。但是我们仍然不知道三个相中的哪两个要交换。正确的相位由计算三相逆变器开关模式的换相逻辑电路指定。让我们直观地看看这些块是如何相互作用的。换相逻辑表中,字母A、B、C代表电机三相;三相逆变器的高侧用H标记,低侧用l标记。根据换向逻辑,看看逆变器和无刷直流换向的开关是如何工作的,让我们用之前的动画替换这部分。 If the rotor is within the first sector, the commutation logic selects this switching pattern, which dictates an on state for the high side switch of phase A and the low side switch of phase C. As the rotor transitions to other sectors, a switching pattern is selected accordingly and sent to the three-phase inverter.
我们让马达旋转,因为现在我们知道什么时候对转子换向,以及在每次换向中给哪个阶段充电。我们的下一个目标是让马达以不同的速度旋转。
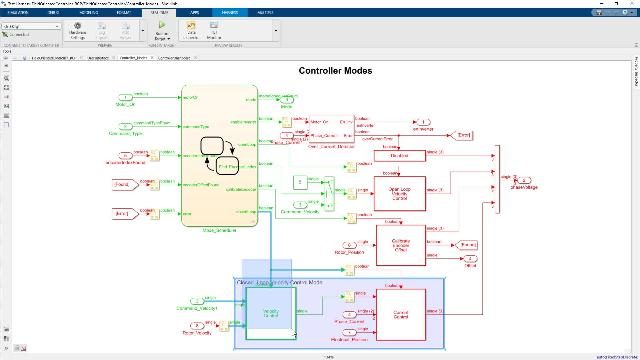
目前,我们输入一个恒定的直流电压到逆变器,这导致恒定的速度,正如我们之前讨论的。我们可以用合适的控制器闭合回路来调节电压。根据所要求的转速和被测转速之间的差异,控制器将调整电压,使电机转速接近所要求的值。这里需要注意的是,换向逻辑也属于控制算法,在图中显示为浅蓝色。物理系统的所有组成部分都用浅灰色表示。这样的电机控制算法可以在这里看到的仿真环境中实现。注意,这里我们假设我们以理想的方式改变电压来演示操作,但实际上我们需要使用PWM,我们将在下一个视频中讨论。如果你想学习如何构建这个模型,不要忘记查看视频下面的链接。彩色框显示了控制算法的不同部分是如何映射到Simulink模型中的子系统的。金宝app该模型记录诸如速度、电压、电流和扭矩等信号。 To explore these, let’s run the model and first look at the desired speed. As you see here, it ramps up from 100 to 500 rpm in 100-rpm increments. If we now look at the voltage, we see how it’s adjusted by the controller to make the motor rotate at the desired speed as seen on the measured speed.
我们马上注意到速度信号中的波动。这里我们有另一个图显示了当转子在扇区之间转换时。看扇区和速度图一起告诉我们速度波纹与换相有关因为波纹图案与每个换相周期的开始是一致的。记住交换过程中发生了什么。其中一相被拉高,另一相被拉低,第三相被打开。如果在换向过程中三相电流如图中所示发生变化,那么我们就不会观察到速度上的任何波纹模式。但实际上,当我们驱动一个相位时,电流并不是瞬间改变的。观察三相电流,我们可以看到它们是如何随时间上升的,这反过来又会导致速度的波动。速度并不是唯一受影响的信号,但我们也观察到转矩响应中的波纹,因为电流和转矩是成比例相关的。在转矩响应中出现的波纹被认为是该方法的缺点之一无刷直流电动机梯形控制。
当我们观察三相电流时,你注意到什么了吗?当一个相从一个开相状态被拉高时,在它开始再次上升之前,相电流会突然跳变。与此同时,另一个跳变发生在换向期间保持低电平的阶段。为了更好地理解通电相中这些瞬间变化背后的原因,让我们看一下这个动画。在换相过程中,随着相电流的增大,磁场在通电相上建立。在换相时,其中一个相,在这个例子中是相A,变成了一个开路,因此在这个开路的相上建立的磁场崩溃。所以相电流降为零。
让我们倒回去看看在对易阶段B和C发生了什么。当具有完全建立场的C相与B相连接时,C上建立的场几乎在瞬间崩塌,而同时B相也建立了一个响应崩塌的场。由于在B相突然建立电场,我们观察到B相电流的跳变。由于C相的坍塌,我们观察到电流的突然下降,由于B和C的磁场在50%的场强下找到平衡,电流下降到其大小的一半。由于这些相电流的瞬时变化,我们观察到三相电压的尖峰。我们刚才描述的这种现象叫做感应反激。
让我们总结一下在这个视频中看到的内容。我们首先讨论了控制算法的不同元素,决定何时换向电机和换向期间的激励阶段。然后我们展示了如何通过控制器调节电压来控制电机的速度。在这里,我们假设一个理想的可控电压源,但在现实中,我们需要一种方法,如PWM来转换恒定的直流电压到交流电压。在下一个视频中,我们将更新我们的控制算法,使用PWM控制电机速度。要了解更多关于电机控制的信息,不要忘记查看视频下面的链接。