自适应过滤器
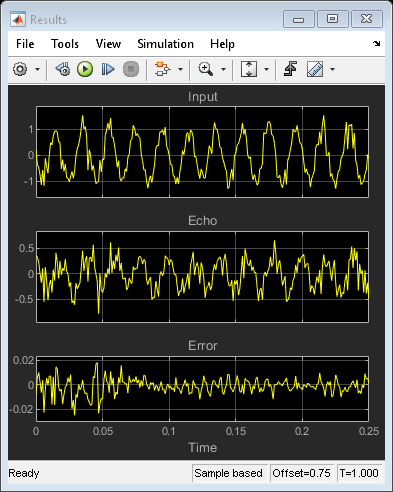
DSP System Toolbox™提供LMS和RLS自适应有限脉冲响应(FIR)滤波器算法的多个变体。虽然这些算法详细差异,但它们共享共同的操作方法,这是最小化自适应滤波器输出和所需信号之间的误差差。平均误差(MSE)是最常用的度量标准来量化此错误。自适应滤波器广泛用于多种应用,包括声噪声消除,回声消除,光束成形,系统识别,生物医疗信号增强,通信信道均衡等。用于说明其中一些应用的示例,参见使用LMS算法对FIR滤波器的系统识别那使用符号数据LMS算法取消噪声消除, 和使用RLS算法逆系统识别。
当输入有色时,提供的仿射投影自适应滤波器算法dsp.affineProightfilter.对象显着提高LMS变化的收敛速度。为了增加计算成本,提供的自适应晶格滤波器算法dsp.adaptivelatticefilter.对象可以通过LMS和RLS对应物提供更好的收敛性。您还可以使用使用域中的自适应FIR滤波器dsp.frequencyDomainainAdaptiveFilter目的。
对象
dsp.blocklmsfilter. |
使用块LMS自适应算法计算输出,错误和权重 |
dsp.lmsfilter. |
计算输出,错误和LMS自适应滤波器的权重 |
dsp.rlsfilter. |
使用递归最小二乘(RLS)算法计算输出,误差和系数 |
dsp.affineProightfilter. |
使用仿射投影(AP)算法计算输出,误差和系数 |
dsp.adaptivelatticefilter. |
自适应晶格过滤器 |
dsp.fasttransversalfilter |
快速横向最小二乘冷杉自适应滤波器 |
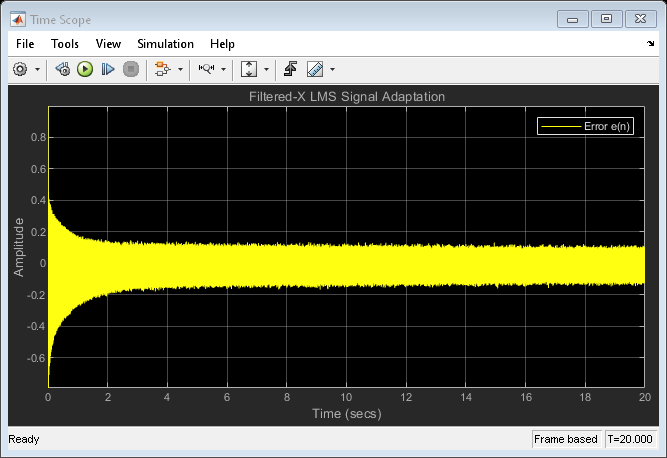
dsp.filteredxlmsfilter. |
过滤XLMS过滤器 |
dsp.frequencyDomainainAdaptiveFilter |
使用频域CIR自适应滤波器计算输出,错误和系数 |
块
话题
关于自适应过滤器的一般性讨论,DSP系统工具箱中的自适应滤波器算法列表,收敛性能以及少数公共应用程序的详细信息。
使用LMS算法识别未知系统。
使用归一化LMS算法识别未知系统。
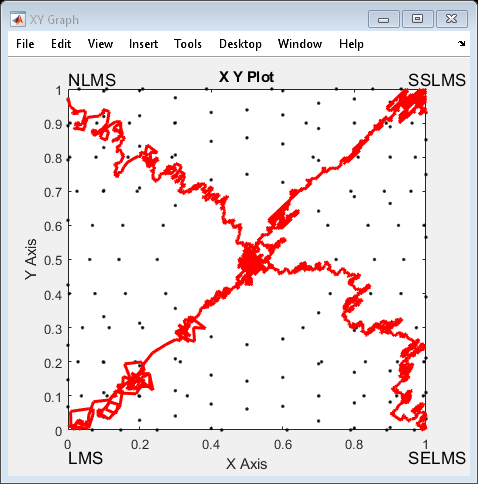
比较自适应滤波器算法收敛的速度。
通过信号增强应用引入自适应滤波器。
使用符号数据LMS算法进行噪声消除。
RLS和LMS自适应滤波器算法的比较。
使用dsp.rlsfilter执行逆系统标识。
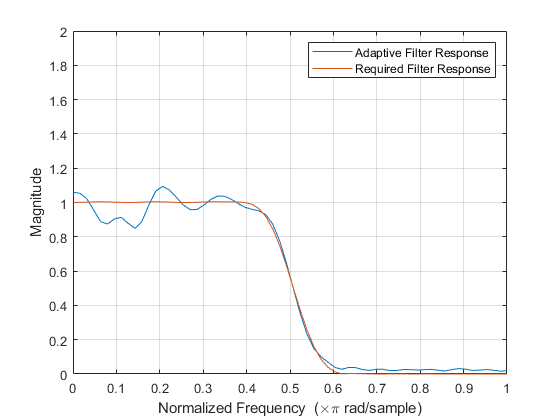
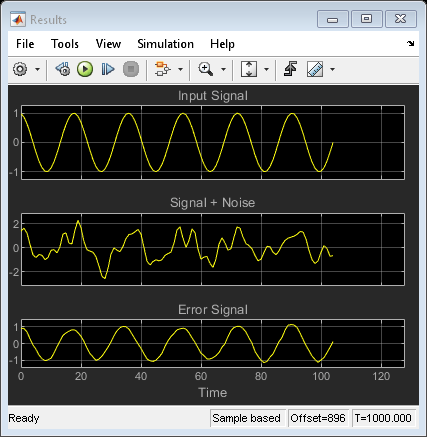
使用归一化LMS自适应滤波器去除Simulink中的低频噪声金宝app
设计归一化LMS自适应滤波器,并使用它以在Simulink中删除低频噪声金宝app®。
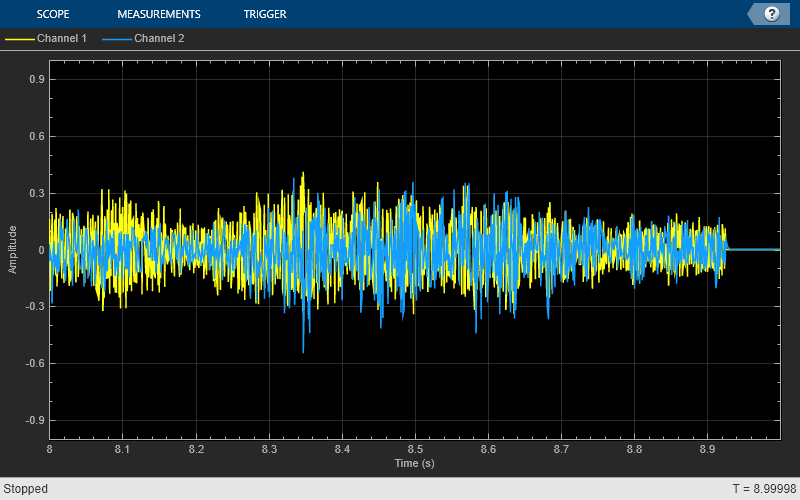
使用归一化LMS自适应滤波器的Simulin金宝appk中的噪声消除
使用归一化LMS自适应滤波器去除从声学环境产生的彩色噪声。
支持DSP系统工具箱中可变大小信号的系统对象列表。金宝app
相关信息
特色例子

您还可以从以下列表中选择一个网站: