传感器融合和跟踪工具箱
Diseñe,模拟多传感器的安装系统
传感器融合和跟踪工具箱™包括算法herramientas diseñar,类似的probar sistemas和数据融合的各种传感器,para mantener percepción del entorno y la localización。Los ejoes de referencia proporcionan un punto partida para desarrollo de la fusión de sensores y el guimiento multiobjeto sistemas de vigilancia autónomos,包括sistemas aéreos, espaciales, terrestres, marítimos y submarinos。
包括雷达、声纳、激光雷达、EO/IR、IMU和GPS。También puede generar datos sintéticos在不同场景下对算法进行虚拟感知。一个工具箱包括您的多对象filtros estimación para evaluar arquitecturas combinan fusión en el nivel de cuadrícula, de detección y de objeto o seguimiento。También proporciona métricas, tales como OSPA y GOSPA, para validar el rendimito con to a scene de validación (ground-truth)。
Para laAceleracióndelassimulaciones o elProtipadoRápido,La Toolbox Soporta LaGeneracióndeCódigoC.
Comience:


免费白皮书
自主系统的传感器融合与跟踪
Vigilancia del EspacioAéreo
我们的目标是利用雷达、ADS-B和EO/IR等多种传感器。我个人在电影中反对。

Seguimiento de un avión con scenario centrados en la Tierra。
Vigilancia espacial
我们可以看到各种各样的反对空间利用雷达的传感器,例如percepción, situación空间。我们可以用一种运动模式和另一种轨道模式来配置。

我们的空间和运动模式是一致的。
义务警员marítima
我们的目标是在地面上安装雷达marítimas和激光雷达resolución。

Seguimiento para sistemasautónomos
Mejore Los Sistemas dePercepciónNenVenículosSutónomosMediante El Seguimiento de Objetos Solpiados Con DatosdeCámara,Radar Y Lidar。Fusione Nubes de Puntos,Detecciones Y Seguimientos de Varios Sensores Para EnferaraLaPosición,LaCinemática,LaextensiónyLaOrientacióndeStosObjetos。
Seguimiento conúnico传感器
该模型用于实现传感器智能所要求的多目标。为了把变形人的罪行包括在反对的清单中。

Fusión·州州州州扎里亚
我们要注意的是,要对各种传感器的数据和传感器的模态进行集中处理。我们可以用hipótesis de probabilidad (PHD) para estimar la cinemática de objetos en moviento, junto con the dimension y la orientación de los objetos。我们要完成所有的任务,并将其付诸实施。cuadrícula Para seguir la ocupación de cada celda de la cuadrícula, así como su cinemática。

Fusión en el nivel de seguimiento
Fusione Seguimientos de Varias fuentes de seguimiento para lograr Unareserciónmásfigperadel Entorno。evalúelas arquitecturas defusión跟踪en is sistemas con limitaciones de ancho de banda y sistemas que Emplean控制de rumores para fillinar结果os Obserodos。

Filtros de estimación y asociación de datos
你的时间是你的,你的目标是利用你的延伸librería de filtros de estimación,你的故事是卡尔曼线性和无线性,多模式和partículas。在óptimas o k-óptimas al problem de asignación 2D o al problem de asignación S-D。一种检测器,一种检测器,另一种检测器。

我想要一个人去,但是没有高斯。
Seguidores multiobjeto。
Intente Filtros deErgentación,Algoritmos deAsignaciónYLógicaDeGestióndelSeguimientoen Seguidores Multibogeo Para Fusionar LAS Detecciones en Los Seguimientos。Convierta Los Datos De Sensores A UN Formato deDeteccióny utilice uneguidor deVecinoMásPróximo全球(GNN)Para Escenarios Simples。Para Escenariosdifícilles,Como El Seguimiento de Objetivos Muy Cercanos Que WenseanAmbigüedadesDeMicalión,普德奥·佛罗里达州Por un Seguidor Comento deAsociacióndeatosprobabilísticos(jpda),un seguidor de variashipótes(mht)o of seguidor phd。

他反对在cuadrícula上演奏吉他
用一个seguidor PHD para seguir la cinemática, el tamaño y la orientación来反对放大器。利用传感器resolución的故事,我们可以使用激光雷达,我们可以使用激光雷达cuadrícula para estimar las características dinámicas de las celdas de la cuadrícula en entornos urbanos complejos。

Fusión en el nivel de seguimiento
其他国家的人反对fusión轨道对轨道的传感器。Diseñe seguimiento discentralizados en sistemas con ancho de bandingido。我们可以从propagación上了解到,这条消息将被取消。

Arquitecturas de融合
探索las arquitecturas de seguidores y evalúe los tradeoffs de diseño entre las arquitecturas de fusión track-to-track, de seguimiento de nivel central o de seguimiento híbrido。Utilice la fusión estática (detección) para combinar detecciones de sensors solo de ángulo y de solo rango, tales como IR, ESM o radares biestáticos。

Seguimiento consensivos síncronos distribuidos。
我们反对我们提出的问题
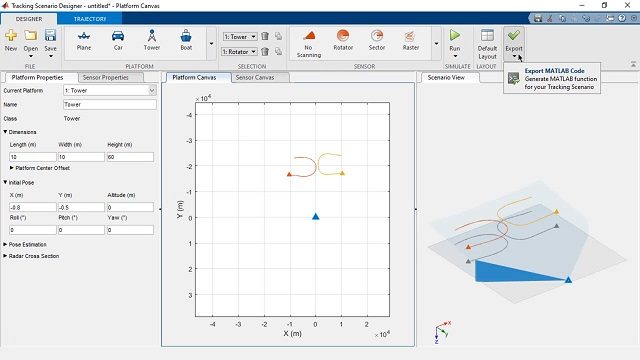
在应用程序中定义交互式的场景跟踪场景设计师和MATLAB类型的脚本,定义转换到posición,速度到orientación,真正的对象和参照马可斯不同。
传感器的活动方式是passivos
模型传感器激活(包括雷达,声纳和激光雷达),并对目标进行探测。模拟探索mecánicas y electrónicas en acimut, elevación o ambos。雷达感应接收器模型传感器(RWR),声纳传感器electrónico (ESM),声纳在一般情况下的探测,ángulo,在seguimiento的情况下。雷达、声纳、信号传感器的模型系统。

Simulaciones蒙特卡洛
蒙特卡洛的模拟现实是利用不同的价值。介绍在validación(地面真实)的构型上的扰动,以及在拉斯普里巴斯的罗布斯特兹的对流层的传感器。

传感器模型INS
Modele Sensores de Unidad deMedición纯粹(IMU),GPS,Altímetrose Ins。Ajuste losparámetrosdel Medioampiente,Tales Como La Memperatura,Y拉斯提议De Ruido de Los Modelos Para Emular Entornos Del Mundo Real。

传感器的模型和GPS的估计算法。
Estimación de la orientación
本课程为acelerómetros y magnetómetros para simular una brújula electrónica (eCompass)。我们可以在acelerómetros的演讲中,在magnetómetros的演讲中,在AHRS的实践参考中,在orientación的演讲中,在AHRS的实践参考中,在orientación的演讲中。

Estimación de la pose
这一位置限制了GPS的中位传感器。在altímetros u odometría visual.com上确定GPS中位数fusión传感器的位姿。

Odometría visual-inercial utilzdo datos fusionados de IMU y cámara。
Visualizaciones de escenarios
代表gráficamente la orientación y la velocidad de los objetos, las trayectorias de validación (ground-truth), las mediciones de senres y los seguimientos en 3D。请代表gráficamente las incertidumbres de detección y seguimiento。这是历史记录的记录。

Gráfica teatral de un scenario multiplatforma。
Métricas de sensores y seguimientos
GenereMétricasdeAbstecimiento,MantenimientoYImpinacióndeSeguimientos,Tales Como Longitud de Seguimiento,Interpciones de Seguimiento E Intercambios de Id De Seguimiento。estime laprecisióndel seguimiento medianteposición,velocidad,aceleraciónyRaízdel错误CuadráticoMedio(RMSE)De Velocidad de Giro O错误Al Cuadrado deErroraciónnalonezadopromedio(AneeS)。Utilicelasmétricasoneetadas de Ospa y GoSpa Para Obener UnaPuntuaciónúnicade Rendimiento。Analice El Ruido de联合国传感器纯粹的Usando La Varianza de Allan。

调整过滤器和过滤器
调整los parámetros de los seguidores multiobjeto,讲述asignación的本影,la función de inicialización del过滤,y confirmación y eliminación的本影,para maximizar el rendimito。比较两者之间的结构。调整automáticamente los filtros INS para optimizar los parámetros de ruido。

WeneracióndeCódigo
generere código C/ c++ y MEX para la aceleración de simulaciones o el prototipado de escritorio conMatlab编码器™。Aplique UmbralesdeCálculode花费Para Reducir el Tiempo DedicadoAlCálculodel Coste deAsignación。