计算机视觉工具箱
Concevoir et Tester desSystèmesdeCopleVision,De Vision 3D et de TracitementVidéo

计算机视觉工具箱™ 继续介绍算法、功能和应用,以及计算机视觉系统、三维视觉和培训视频的相关测试。这是一种利用保护和保护、提取和对应卡拉奇风险的方法。Pour la vision 3D、la toolbox supporte le calibrage de caméras unique、stéréo et fisheye、la vision stéréo、la reconstruction 3D和la traitement de points lidar et 3D。Des应用程序与计算机视觉的交互自动实现了地形和地形测量的实验室工作流程。金宝app
这是可能的'entraîner des détecteurs d'objets personnalisés avec des算法的深度学习和机器学习告诉YOLO v2,更快的R-CNN和ACF。为分割sémantique,您可以使用senet, U-Net和DeepLab的深度学习算法。在modèles pré-entraînés你可以看到détecter的面容,在piétons和其他的事物。
VOUS POUVEZACCÉLÉRERVOS算法EN LESEXÉCUTANTURSGPUet des Processeurs Multicuareurs。La Plupart des algorithmes de Cette Toolbox 金宝appSupportent LaGénirrationde Code C / C ++ Pour L'Intégrationàdu代码现有,Le Protopage Sur PC et LeDéploiementdeSystèmesDevisionEmbarqués。
En savoir plus:

Détection和侦察物体
La Toolbox提出Des Infrastructores D'Apperentage,D'Évaluationet dedéploiementdedétecteursd'objets,Tels queyolo v2,更快的R-CNN,ACFR et Viola-Jones。LaPocleitédeFocnissanced'Objets Creatut UnModèlede Sac de Mots Visuels等roctiance Optiques decaractères(OCR)。LesModèlesPré-entraînésdé4tentLes景点,LesPiétonset d'Autres Objets驻地。


Détection d'objets avec Faster R-CNN。
分割塞曼提克
Segmentez Les图片等LES卷3D分类Des Pixels et des voxelsàl'aidedeRéseauxtels que segnet,fcn,u-net et deeplab v3 +。

Labélisation de données de vérité地形
自动化实验室用于检测目标、分割、分类和应用视频贴标机和图像贴标机。
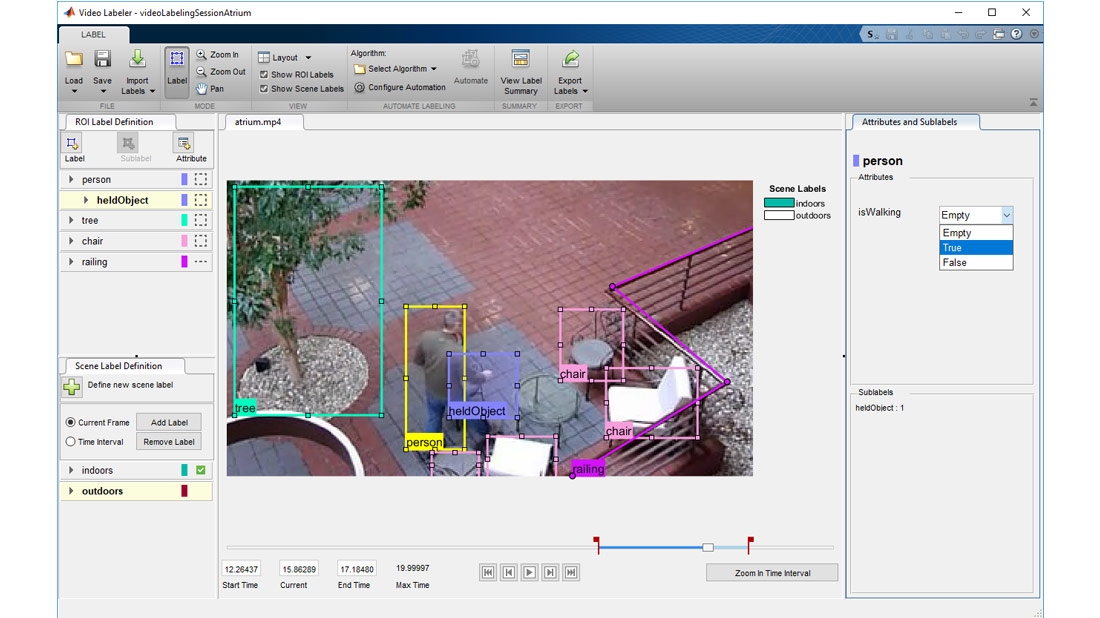
地形应用视频贴标机实验室。
Traitement de Nuages de点Lidar等3D
Segmentez,Groupez,Sous-Échantillonnez,雷亚斯·埃尔库茨(Recalez et Ajustez)GéométriquesAvecdesDonnéesenfore de Points Lidar欧3D。激光雷达工具箱™提出fonctionnalités supplémentaires激光雷达的安装、分析和测试systèmes de tritement de données。

重新计算点数
Recalez-les nuages de points 3Dál'aide d'算法NDT(正态分布变换)、ICP(迭代最近点)和CPD(相干点漂移)。

重画和蒙太奇的série de nuages de points。
细分et ajustement de形式
Segmentez Les Nuages De点En Clusters et ajustez les formesgéométriquesoux remes de点。Segmentez Le Plan De Sol Dans LesDonnéesLidarPleDes Applications de Conduite Autonome et de Robotique。

痣de点lidarsemmenté。
Calibrage de caméra独特
Automatisez la détection du damier et calibrez les caméras à sténopé et fishheye à l'aide de l'application Camera Calibrator。

校准caméra stéréo
Calibrez联合国情侣Stéréoscopique倒数计算员La Profondeur et Reconstruisez desScènes3D。

应用立体相机校准器。

结构多Vues删除了partir d'un mouvement。
视觉立体
我们重建了一个scène 3D和一个caméras stéréoscopiques。
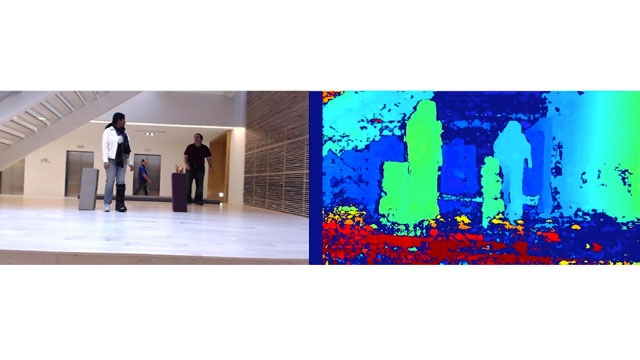
代表亲属的权利分配单。
Détaction,Exedita eCysidance
技术、技术和信仰对应于一块、一块、一块和多枚硬币的图案。

Détectiond'联合国Objet Dans UneScèneCombréeNENUILUSANTLAIDENCONETEN,L'EXTRACTION等人员EN符合D'Intérêt。
重铸卡拉克里斯蒂克河畔的图像
Faites对应的les caractéristiques的plusieurs的图像在d’estimer的les géométriques的图像中心和回忆les séquences的d’images。

全景créé par recalage basé sur les caractéristiques。
Pistage d 'objets
一个图像的轨迹是à另一个是séquences vidéo。

Les追踪了物体的轨迹。
估计du mouvement.
estimez联合国Mouvement entre Deux I图片D'Unevidéoen Utherant Un Flux Optique,Une Condadydands de Blocs et deModèles。

Détection d'objets en movement à l'aide d'une caméra stationnaire。

GénérationDeCode.
Générez du code C/C++和CUDA,是一个由多个函数组成的函数、类、系统对象和工具箱。

掩码RCNN
Entraînez des réseaux Mask-RCNN用于深度学习的实例分割
SLAM(同时定位和地图)可视化
Gérez点的3D表示和2D图像点投影的对应关系
估计de la pose des apriltag
Détectezet estimez la Pose des apriltag dans Une图像
重新计算des ymages de点
在应用程序SLAM中,我们应该在corrélation的阶段使用点
Détection de fermeture de boucle à partir de nuages de points
decaractéristiquede nuages de points de fermeture de boucle slam
Consultez Les.Notes de版本倒入Savoir Plus Sur CESFonctionnalitésetendenctions诉讼。
