何塞·阿文达诺和塞巴斯蒂安·卡斯特罗带你通过MATLAB中的机器人机械手工作流程®和仿真软金宝app件®.您将看到如何导入自己的设计或创建MATLAB和Simulink表示,以快速编程和模拟操作任务,如使用Robotics System Tool金宝appbox™中的现有算法跟踪路径点。
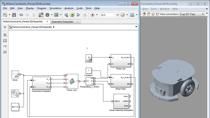
您将学习如何导入一个机器人机械手的几何描述文件到一个MATLAB表示以及如何使用可用的特性,例如正向和逆向运动学求解所需的机器人配置达到一个点在空间和遵循所需的轨迹。此外,Jose和Sebastian介绍了如何将机器人的几何形状导入Simscape Multibody™,以获得集成MATLAB代码的3D仿真环境,设计和验证监督逻辑,并测试控制算法。作为奖励,您还将看到如何创建机器人操纵器模拟,包括感知,以完成更高级的操作任务。
欲了解更多信息,请查看以下资源: