NASA HL-20升降体机身
介绍
本案例研究模拟了NASA HL-20提升体的机身,这是航天飞机轨道器的低成本补充。HL-20是无动力的,但是模型包括机身和控制器。
对于大多数飞行控制设计,需要对机身或机群模型建模、模拟和分析。理想情况下,这种机身应该快速建模,重用块或模型结构,以减少验证时间,并留出更多的时间用于控制设计。在这项研究中,Aerospace Blockset™软件有效地模拟HL-20机身的部分。剩下的部分,包括空气动力系数的计算,用Simulink建模金宝app®软件本案例研究检查HL-20机身模型和触摸如何在模型中使用空气动力数据。
NASA HL-20升降体
HL-20,也被称为人员发射系统(PLS),是一种提升体再入飞行器设计来补充航天飞机轨道器。它最初是作为一种用于往返近地轨道的低成本解决方案开发的。它最多可以搭载10个人和有限的货物[1].
HL-20的提升体可以被放置在轨道上,可以用助推器火箭垂直发射,也可以在航天飞机轨道飞行器的有效载荷舱中运输。HL-20提升体使用小型机载推进系统脱轨。它的再入侧面是头朝前,水平,无动力。
HL-20提升体的前视图(图片来源:NASA Langley)
HL-20设计有许多好处:
着陆和发射之间的快速周转降低了操作成本。
HL-20具有特殊的飞行安全性。
它通常可以降落在飞机跑道上。
HL-20的潜在用途包括
对滞留宇航员的轨道救援
国际空间站人员交流
观察任务
卫星服务任务
虽然HL-20计划目前没有活动,但HL-20测试的空气动力学数据正在美国宇航局目前的项目中使用[2].
HL-20机身和控制器模型
进入即可打开HL-20机身和控制器模型aeroblk_HL20在MATLAB®命令行。

建模假设和局限性
HL-20提升体的初步空气动力学数据来自NASA文件TM4302[1].
机身模型包含了几个关键的假设和限制:
假设机身是刚性的,有恒定的质量、重心和惯性,因为模型只代表了任务的无动力再入部分。
HL-20被假定是一种横向对称运载工具。
可压缩性(马赫)效应被认为是可以忽略的。
假设控制效果随攻角非线性变化,随偏角线性变化。控制效果与侧滑角无关。
非线性六自由度空气动力学模型是HL-20早期版本的代表。因此,模型不打算用于HL-20后期版本的真实性能模拟。
典型的机身模型由许多部件组成,例如
运动方程
环境模型
计算空气动力系数,力和力矩
HL-20模型的机身分系统包括五个分系统,分别对机身典型部件进行建模:
-
HL-20机身子系统


6自由度(欧拉角)子系统
六自由度(欧拉角)子系统包含了机身的六自由度运动方程。在六自由度(欧拉角)子系统中,采用欧拉角表示的姿态在时间上传播。这个子系统是来自Aerospace Blockset库的运动块方程之一。四元数表示也可用。看到6自由度(欧拉角)和6自由度(四元数)块参考页以获得关于这些块的更多信息。
环境模型子系统
环境模型子系统包括以下子系统和模块:
WGS84重力模型块实现了世界大地测量系统(WGS84)地心等位椭球体的数学表示。
看到WGS84重力模型块参考页以获得关于此块的更多信息。
COESA大气模型模块实现了1976年扩展到标准大气委员会(COESA)标准的绝对温度、压力、密度和声速的低层大气值的数学表示,给定输入的位势高度。
看到COESA大气模型块参考页以获得关于此块的更多信息。
风模型子系统包含以下模块:
风切变模型块将风切变添加到模型中。
看到风切变模型块参考页以获得关于此块的更多信息。
离散风阵风模型块实现标准的“1 -余弦”形状的阵风。
看到离散阵风模式块参考页以获得关于此块的更多信息。
德莱顿风湍流模型(连续)块使用德莱顿谱表示,通过适当的形成过滤器通过带限白噪声,将湍流添加到航空模型中。
看到德莱顿风湍流模型(连续)块参考页以获得关于此块的更多信息。
环境模型在标准参考中实现数学表示,如美国标准大气,1976。
HL-20机身模型中的环境模型

HL-20机身模型中的风模型

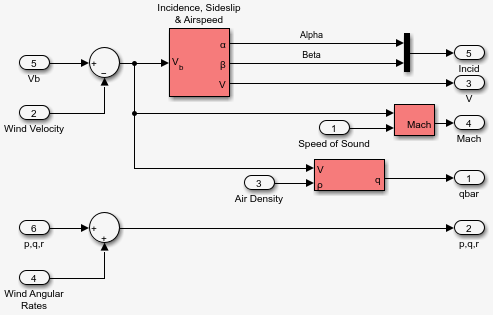
阿尔法,贝塔,马赫子系统
阿尔法,贝塔,马赫子系统计算气动系数计算和查找所需的附加参数。这些附加参数包括
马赫数
入射角度(
 )
)空速
动压
马赫子系统根据风速修正了身体的速度根据风的角加速度修正了身体的速率。
HL-20机身模型的附加计算参数(Alpha, Beta, Mach子系统)
空气动力系数子系统
气动系数分系统包含气动数据和计算6个气动系数的方程,如参考文献所示[1].接下来是6个空气动力系数。
| Cx | 轴向力系数 |
| Cy | 侧向力系数 |
| Cz | 法向力系数 |
| Cl | 滚动力矩系数 |
| C米 | 俯仰力矩系数 |
| Cn | 偏航力矩系数 |
地面和起落架效应不包括在这个模型中。
这些系数的贡献计算在子系统(身体速率,驱动器增量,和基准),然后求和并传递给力和力矩子系统。
HL-20机身模型的气动系数
气动数据来自风洞试验,主要是HL-20初步亚音速气动模型的比例模型。对数据进行曲线拟合,大部分气动系数采用迎角和侧滑角的多项式函数描述。关于空气动力数据和数据简化的深入细节可以在参考文献中找到[1].
多项式函数包含在aeroblk_init_hl20.m文件用于计算模型预加载函数使用的查找表。查找表代替多项式函数。根据函数的顺序和实现,使用查找表可能比在函数的每个时间步骤中重新计算值更有效。为了进一步提高效率,大多数表使用prelookup块实现为prelookup索引搜索和插值(n-D)。当模型中有许多具有相同断点的表时,这些块可以最大程度地提高性能。这些块减少了模型在给定时间步骤中搜索断点的次数。一旦用预紧力函数填充表格,气动系数就可以计算出来。
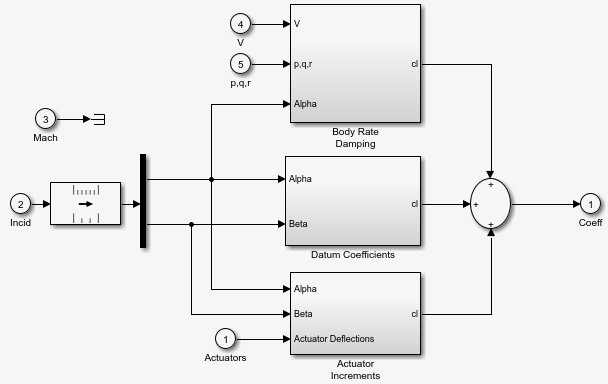
六个气动系数的计算公式分为三个子系统:
将基准系数、体率阻尼和作动器增量子系统的输出相加,可以得到用于计算机身力和力矩的6个气动系数[1].
基准系数子系统。基准系数子系统计算基本配置的系数,不需要控制面偏转。这些基准系数只取决于物体的入射角。

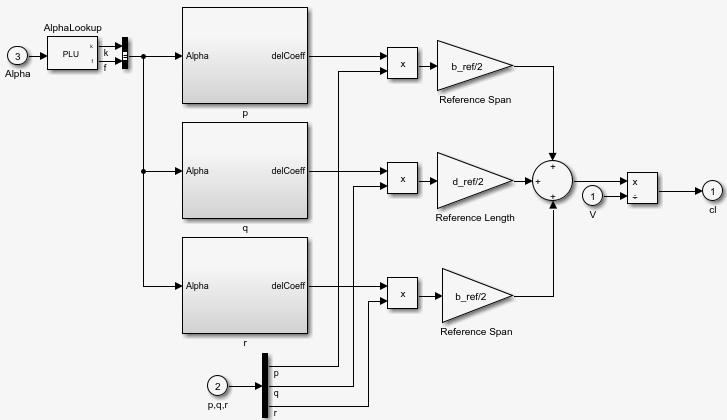
身体速率阻尼子系统。在体率阻尼子系统中计算动态运动导数。
致动器增量子系统。查找表确定由于执行器增量子系统中的控制面偏转导致的系数增量变化。可用的控制面包括对称襟翼(升降舵)、差速襟翼(副翼)、正襟翼、负襟翼、差速襟翼和全可动舵。

力和力矩子系统。力和力矩子系统计算作用在机身上的关于重心的力和力矩。这些力和力矩取决于气动系数、推力、动压和参考机身参数。

完整的模型
你们检查的这些子系统完成了HL-20的机身。飞行控制设计过程的下一步是分析、修剪和线性化HL-20机身,以便为其设计飞行控制系统。你可以看到一个HL-20机身自动着陆飞行控制的例子aeroblk_HL20的例子。
参考文献
[1] Jackson, E. B.,和C. L. Cruz,“HL-20提升体模拟研究的初步亚音速气动模型”,NASA TM4302(1992年8月)。
[2] Morring, F., Jr.,“国际空间站‘救生艇’研究包括elv,”航空周刊与空间技术(2002年5月20日)。
外部网站
你也可以从以下列表中选择一个网站: