使用Simulink实时主动噪声控制金宝app
设计使用的Speedgoat Simulink的实时目标实时主动噪声控制系统。金宝app
有源噪声控制(ANC)
有源噪声控制的目的是通过产生抵消不希望的声波的“反噪声”信号,以减少不期望的声音。这一原则已被成功应用到各种各样的应用,如降噪耳机,在汽车内饰主动声音设计,并在通风管道降噪和通风罩。
在这个例子中,我们采用基于模型的设计原则。首先,我们在我们的模拟使用简单的声学模型设计ANC无需任何硬件。然后,我们通过将取代模拟声学路径完成我们的原型的Speedgoat目标计算机和支持金宝app(金宝appSimulink的实时)及其IO104模拟模块。该的Speedgoat是Simulink的外部实时目标,这使我们能够实时地执行我们的模型,观察任何感金宝app兴趣的数据,如自适应滤波器系数,实时。
这个例子有一个伴侣视频:有源噪声控制 - 从建模到实时原型。
ANC前馈型
下图说明一个典型的例子前馈ANC。在导管的入口处的噪声源,诸如风扇,由扬声器“取消”。噪声源b(ñ)与一个参考麦克风测量,并且存在于系统的输出处的信号与误差麦克风监测Ë(ñ)。需要注意的是参考麦克风和扬声器之间的距离越小,速度越快,ANC必须能够计算和回放“抗噪”。
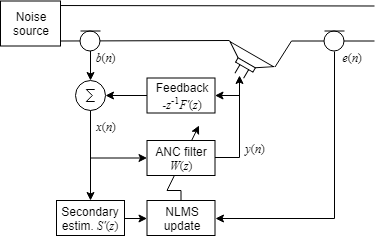
主路径是两个麦克风之间的传递函数,w ^(ž)是从最后一个可用的误差信号计算出的自适应滤波器Ë(ñ),并且次级路径小号(ž)是ANC输出和误差麦克风之间的传递函数。次级路径估计S”(ž)被用于过滤NLMS更新函数的输入。此外,声反馈F(ž)从ANC扬声器到参考麦克风可以被估计(F'(ž)),并从所述参考信号中除去b(ñ)。
为了实现成功的ANC系统,我们必须估计主要和次要路径。在这个例子中,我们估计辅助路径和声学反馈第一,然后保持恒定,而ANC系统适应的主路径。
x滤波ANC模式
随着Sim金宝appulink和基于模型的设计,你可以期望的系统的基本模型和模拟环境中启动。然后,你可以提高该模型的现实主义或现实替换模拟环境。您也通过迭代可以改进你的模拟环境中,当你了解了真实系统的挑战。例如,你可以声反馈或测量噪声添加到模拟的环境,如果这些是限制真实世界系统的性能元素。
开始用x滤波NLMS ANC系统的模型,包括ANC控制器和管道的声学环境两者。假设我们已经拥有了二次路径的评估,因为我们将稍后系统设计来衡量。模拟在误差麦克风由初级声路径和ANC输出由次级声学路径过滤过滤所述噪声源的总和信号。在于,由所述误差麦克风捕获的信号最小化的结构使用一个“LMS更新”块。在筛选-X的系统,所述NLMS更新的输入是由所述次级路径的估计过滤噪声源。为了避免代数环,还有新的滤波器系数的计算和由LMS滤波器的使用之间的一个样本的延迟。
设置为次要路径小号(ñ)= [0.5 0.5 -.3 -.3 -.2 -.2]和主路径CONV(小号(ñ)F(ñ)),其中F(ñ)= [0.1 0.2 -.1 -.2 0.3 -.3 0.15 -.15]。验证自适应滤波器正确收敛到F(ñ),在这种情况下,它一旦与所述次级路径进行卷积在我们的模型中的主要路径相匹配。注意小号(ñ)和F(ñ)被任意地设定,但我们可以尝试任何FIR传递函数,例如实际的脉冲响应的测量。



二级路径估算模型
设计估计次级路径的模型。使用的自适应滤波器在一个配置适合于未知系统的识别。然后,我们可以验证它收敛于F(N)。


用的Speedgoat实时实现
与ANC实验在实时环境中,我们建立了经典的管道例子。在下图中,从右到左,我们有一个扬声器播放的噪声源,参考麦克风的ANC扬声器和误差麦克风。

延迟是关键:系统必须记录参考麦克风,计算响应和回放上花费的声音在这些点之间的旅行时间ANC扬声器。在该示例中,参考麦克风和“Y”部分的开头之间的距离为34公分。声音的速度为343米/秒,因此我们的最大等待时间为1毫秒,或在本例中使用的8kHz采样率的8个样品。
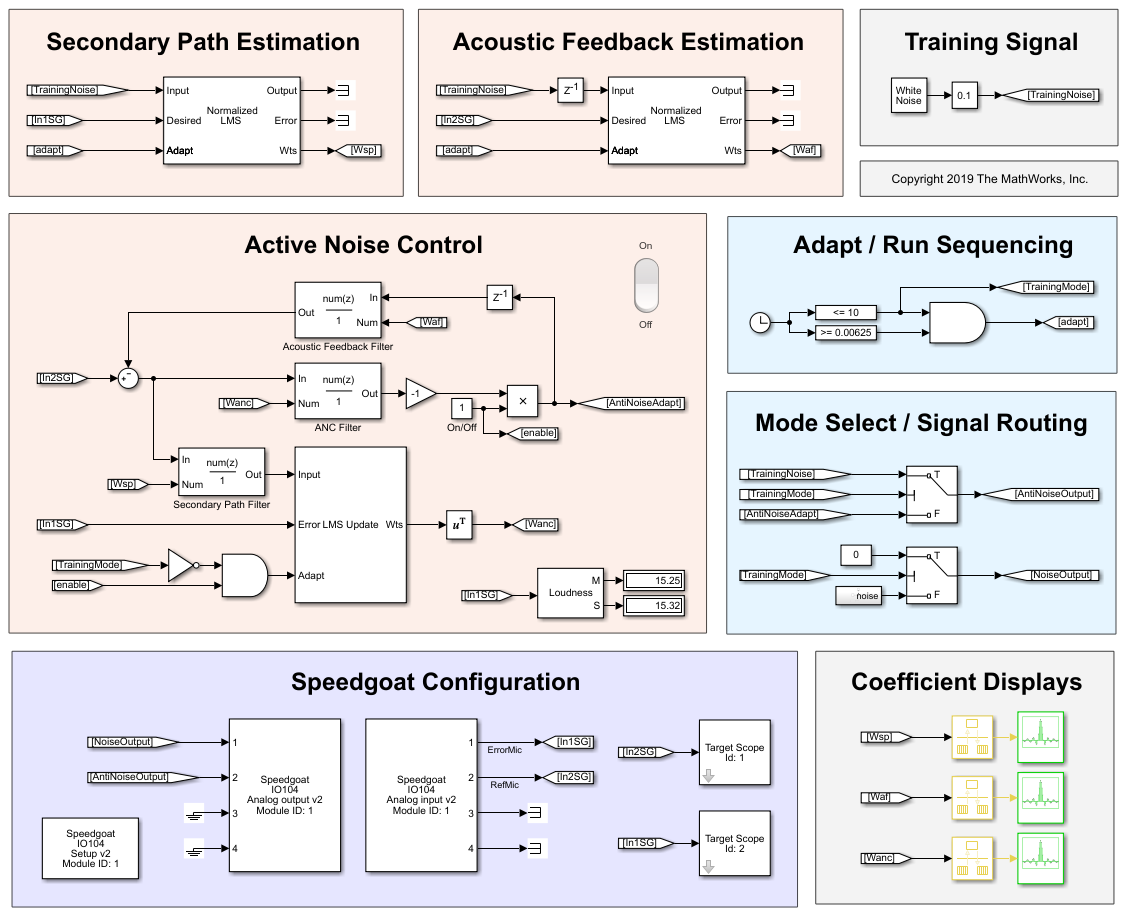
我们将使用的Speedgoat实时目标在Simulink,与IO104模拟I / O接口卡。金宝app该的Speedgoat使我们能够达到一个延迟低至一个或两个样本。

为了实现我们的实时模型,我们用积木我们先前测试,仅仅通过的Speedgoat I / O模块更换声学模型。我们还包括从所述ANC扬声器到参考麦克风的声反馈的测量,我们加入了一些逻辑来切换到实际ANC模式之前自动测量10秒的辅助路径。在第一个10秒,白噪声被播放的ANC扬声器和两个NLMS滤波器被启用,每麦克风一回。然后,“噪声源”由模型为了方便回放,但ANC系统的实际输入是参考麦克风(该回放可以通过实际噪声源来代替,如在的右端的风扇管)。系统将记录参考麦克风,以适应ANC NLMS滤波器和计算该ANC扬声器的信号。我们照顾到建立我们的模型属性,以便IO104卡驱动Simulink模型的节奏(见金宝appIO104在中断驱动模式)。要访问模型的文件夹,点击“打开脚本”按钮,打开例子。该模型的文件名是“Speedgoat_FXLMS_ANC_model.slx”。
降噪性能
我们测得该ANC原型既双色调和闷闷的洗衣机的实际记录的性能。我们获得了20-30分贝的双色调和8-10分贝的记录,这是一个更现实,也更困难情况下的降噪。该滤波器的收敛速度小于与色调的几秒钟,但需要的实际情况(一两分钟)更多的时间。

延迟测量
的性能另一个方面是系统的等待时间,因为这确定参考麦克风和扬声器ANC之间的最小距离。在我们的原型,主动ANC扬声器,我们正在使用可能引入的延迟,所以我们可以保证,这不是通过比较在ANC输出信号和误差麦克风之间的响应两个麦克风之间的响应的问题。这两个延迟之间的差异是该系统具有可用于计算从参考麦克风所述抗噪声信号的最大时间。使用相同的NLMS识别技术,我们获得从基准麦克风到误差麦克风以下响应:

然后,我们可以比较次要路径推定响应:

所不同的是只有2或3个样品,因此,使用我们目前的有源扬声器和的Speedgoat,我们不能显著降低所述参考麦克风和在我们的原型的ANC扬声器之间的距离。为了减少距离,我们需要的是不引入任何额外的延迟扬声器。我们还可以提高仿真模型的采样率(的Speedgoat延迟被设置为1个或2个样品,而不管采样速率)金宝app。
参考
S. M.郭和D. R.摩根,“有源噪声控制:一个教程审查”在IEEE,第论文集。87,没有。6,第943-973,1999年6月。
K.-C.陈,C.-Y.常和S. M.郭“在管道有源噪声控制以取消宽带噪声,”在IOP会议系列:材料科学与工程,卷。237,没有。1,2017年。
的Speedgoat目标计算机和支持金宝app(金宝appSimulink的实时)
也可以看看:有源噪声控制使用x滤波LMS FIR自适应滤波器
您还可以选择从下面的列表中的网站: