配置AUTOSAR调度和模拟
要为AutoSAR架构模型配置调度和仿真,您可以:
添加基本软件(BSW)块以模拟对BSW服务的调用。
创建测试线束模型,将输入和工厂元素连接到架构(architecture)模型。
使用计划编辑器计划并指定组件Runnables的执行顺序。
要在开放式体系结构模型中模拟聚合组件的行为,请单击跑.
模拟基本软件服务调用
对于AUTOSAR经典平台,AUTOSAR区块集提供基本软件(BSW)块,允许您对在AUTOSAR运行时环境中运行的BSW服务的软件组件调用进行建模。BSW服务包括NVRAM管理器(NvM)、诊断事件管理器(Dem)和功能抑制管理器(FiM)。在运行时环境中,AUTOSAR软件组件通常使用客户端-服务器或发送方-接收方通信来访问BSW服务。
要模拟调用BSW服务的AutoSAR组件,请创建包含的体系结构,组合或测试线束模型,并添加预配置的BSW服务组件块。该块提供BSW服务操作的参考实现。
如果架构模型中的组件使用BSW调用程序块,请确保架构模型包含BSW服务实现。有关详细信息,请参阅AUTOSAR基本软件服务调用模型和模拟AUTOSAR基本软件服务和运行时环境.
有关在AutoSAR架构模型中使用BSW Blocks的示例,请参阅作者在架构模型中编写AUTOSAR组件和组件.
连接测试线束
开发架构(architecture)模型后,可以将其连接到提供有意义的输入值和工厂模型元素的测试线束模型。例如,考虑架构模型。autosar_tpc_组合以身作则作者在架构模型中编写AUTOSAR组件和组件.该模型具有三个需要(输入)端口,一个提供(输出)端口。
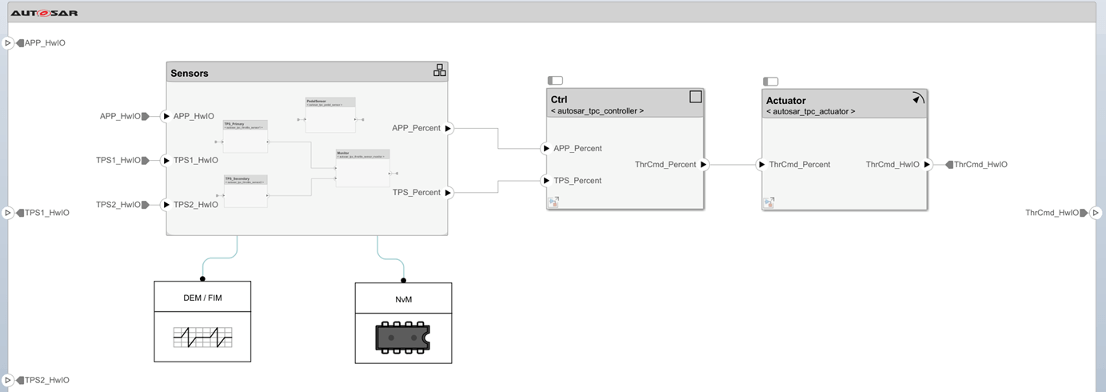
下面是一个用于模拟体系结构模型的测试线束模型autosar_tpc_组合. 测试线束包含一个带有踏板输入块的工厂模型,以及与架构模型要求和提供端口相对应的信号。该模型是从示例模型改编而来的autosar_tpc_system..

要将架构模型连接到测试线束,请执行以下操作:
插入模型块
配置模型块以引用体系结构模型。
在里面模型块对话框,选择选项计划费率. 用于关联的参数将费率与选择
明细表编辑器.架构模型组件具有与计划编辑器可以安排的显式分区。将架构模型端口连接到测试线束信号。


查看和运行已完成的测试线束模型,打开示例模型autosar_tpc_system..(要在本地工作文件夹中打开模型,请使用openExample(“autosar\u tpc\u系统”)。)
计划组件可运行项
对于包含多个可运行程序的AUTOSAR经典平台软件组件,AUTOSAR定时扩展规范定义了执行顺序约束。这些约束指定组件中可运行实体的执行顺序。您可以在组件级别查看和操作约束,或者在AUTOSAR体系结构模型中,在虚拟功能总线(VFB)级别查看和操作约束。
在体系结构模型中,您可以:
从ARXML文件导入VFB级执行顺序约束。
使用计划编辑器修改AUTOSAR组件可运行项的执行顺序。编辑器显示合成层次结构中每个组件中的每个可运行。
作为构图导出的一部分,将VFB级执行顺序约束导出到ARXML时序模块,
模型名称_timening.arxml
要计划和指定AutoSAR组件Runnables的执行顺序,请使用计划编辑器。从独立的组件模型或架构模型,您可以:
查看AutoSAR组件或架构模型中的分区作为分区的图形表示。
创建分区并将其映射到AUTOSAR可运行文件。
直接指定可运行文件的执行顺序。
明细表编辑器支持多种建模样式,包括基于速金宝app率的建模和导出函数建模。有关详细信息,请参阅使用明细表编辑器和创建分区.对于AutoSAR组件模型示例,请参阅配置AUTOSAR可运行执行顺序.
在AUTOSAR体系结构模型中,要打开明细表编辑器,请打开建模选项卡,然后选择设计工具>明细表编辑器.编辑器在构图层次结构中的每个组件中显示每个可运行的。以下是从示例架构模型打开计划编辑器时执行订单视图autosar_tpc_组合.使用编辑器控件修改Runnables的执行顺序。
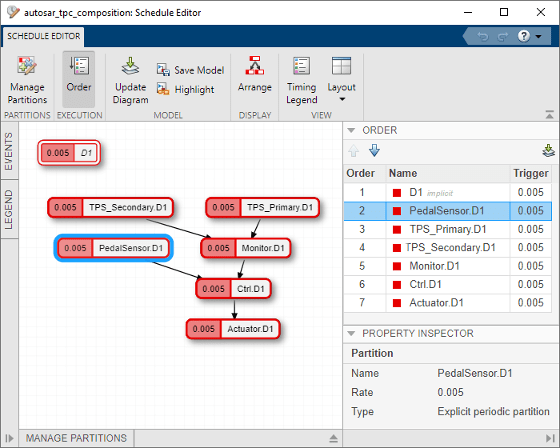
从AUTOSAR体系结构模型导出合成将VFB级别的执行顺序约束导出到文件中模型名称_timening.arxmlautosar_tpc_组合,基于明细表编辑器配置。
TPC_组合 <执行顺序约束UUID =“...”> <短名字> eoc component / tpc_composition <订购元素> Pedalsensor_pedalsensor_step. / components / sensors / pedalsensor <可执行 -Ref Dest =“Runnable-Entity”> / Components / Pedalsensor / Pedalsor_ib / Pedalsor_step 时序/ TPC_Composition / EoC/ tps_primary_throtlesensor1_step tps_primary_throttlesensor1_step. tps_secondary_throttleSensor2_step. monitor_throttleSenormonitor_step. Ctrl\u控制器\u步骤 执行机构执行机构步骤 / components / tpc_composition / contuator <可执行文件 -ref dest =“runnable-entity”> / components / contuator / Actuator_ib / Actuator_Step / components / tpc_composition
另见
相关话题
您还可以从以下列表中选择一个网站: