rangeangle
范围和角度计算
语法
描述
这个函数rangeangle确定信号的传播路径长度方向和路径从源点或一组源指向一个参考点。——功能支持两种传播模型金宝app自由空间模型和双线模型。的自由空间模型是一个单一的视距路径从源点到参考点。的双线多路径模型生成两条路径。第一个路径遵循空间路径。第二个路径是反映道路边界面z = 0。路径方向定义对全球坐标系统参考点或局部坐标系的参考点。在参考点的距离和角度不取决于哪个方向信号沿着路径旅行。
输入参数
|
源点位置,指定为一个实值3×1向量或一个实值3×-N矩阵。一个矩阵表示多个源点。列包含的笛卡尔坐标系N点的形式 当 单位是米。 |
|
参考点位置,指定为一个实值3×1的向量或一个实值3×-N矩阵。一个矩阵表示多个参考点。列包含的笛卡尔坐标系N点ins的形式 当 单位是米。 默认值: |
|
局部坐标系轴,指定为一个3×3的矩阵或3-by-3-by——实值N数组中。为一个数组,每个页面对应于一个本地坐标轴在每个参考点。列在 默认值: |
|
传播模型,指定为 默认值: |
输出参数
|
传播范围,作为实值返回1 -N向量或实值1 -2 n向量。 当 当 |
|
方位角和高度角,作为2 -返回N矩阵或2 -2 n矩阵。每一列代表一个方向角的形式 当 当 单位在度。 |
例子
更多关于
角度在当地和全球坐标系统
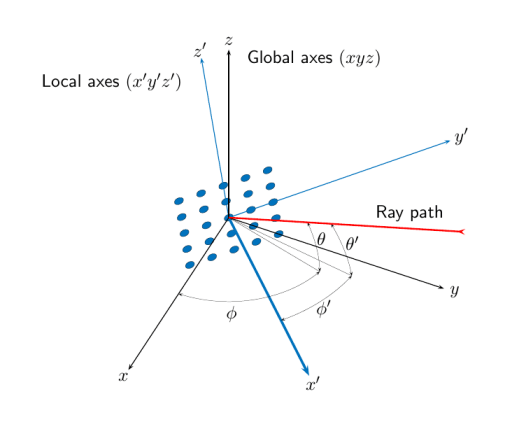
的rangeangle函数的作用是:返回路径距离和路径的角度在全球或当地坐标系统。默认情况下,rangeangle功能决定了角信号路径相对于全局坐标。如果你添加发一次参数,可以计算角度对当地坐标。作为一个例证,这幅图显示了5-by-5均匀矩形数组(URA所言)从全球坐标旋转(某某)使用发一次。的x '局部坐标系的轴(x没有'z”)与数组的主轴,随着数组。方向的路径长度无关。全球坐标系统定义了方位角和高度角(Φθ)和当地坐标系统定义了方位角和高度角(Φ,θ)。
本地和全球的坐标轴
双线传播模型
双线传播通道是在下一步从空间通道和复杂性是最简单的情况下的多径传播环境。直线的无线信道模型视线从1点到2点的路径。在双线频道中被指定为均质,各向同性介质的反射平面边界。边界总是设定在z = 0。最多有两种射线传播从1点到2点。第一个射线路径沿着相同的视线传播路径的空间通道。通常被称为的视距路径直接路径。第二个射线反射边界传播到2点之前。根据反射定律,反射角等于入射角。等短程模拟蜂窝通信系统和汽车雷达,可以假设反射表面,地面或海洋表面是平的。
图展示了两个传播路径。从源的位置,年代年代接收机的位置,年代r,你可以计算到达角的路径,θ′洛杉矶和θ′rp。到达角的仰角和方位角度到达辐射对当地坐标系统。在这种情况下,局部坐标系恰逢全球坐标系统。你也可以计算传输的角度,θ洛杉矶和θrp。在全球坐标,在边界反射的角度是一样的角度θrp和θ′rp。反射角度是重要的知道当你使用angle-dependent反射损失数据。您可以确定反射角度使用rangeangle(相控阵系统工具箱)功能和设置参考轴全球坐标系统。的总路径长度视距路径的图所示R洛杉矶等于几何源和接收器之间的距离。的总路径长度反映路径Rrp= R1+ R2。的数量l是地面源和接收器之间的距离。
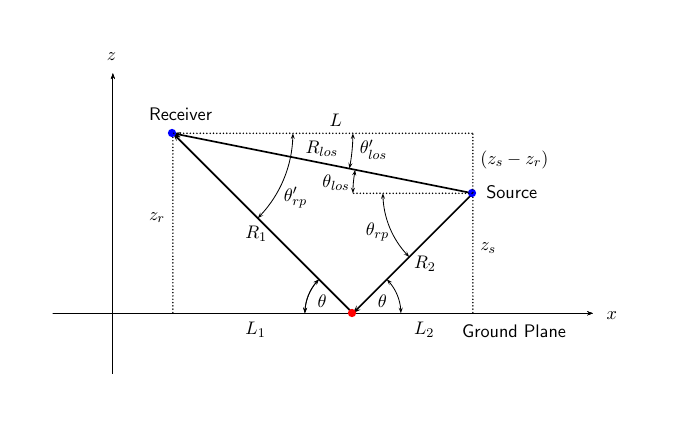
你可以很容易地获得准确的公式路径长度和角度的地面范围和对象的高度在全球坐标系统。