用PID调谐器设计抗干扰PID
本例展示了如何使用PID调谐器工具设计具有良好干扰抑制性能的PI控制器。本例还展示了如何设计具有良好干扰抑制和良好参考跟踪的ISA-PID控制器。
启动具有初始PID设计的PID调谐器
植物模型是
G=zpk(-5,[-1-2-3-4],6,“输出延迟”,1);G.InputName=“你”;G.输出名称=“是的”;
使用以下命令启动PID调谐器,为电厂G设计并行形式的PI控制器。
pidtool(G,“圆周率”)
PID调谐器自动设计初始PI控制器。单击“显示参数”按钮以显示控制器增益和性能指标。

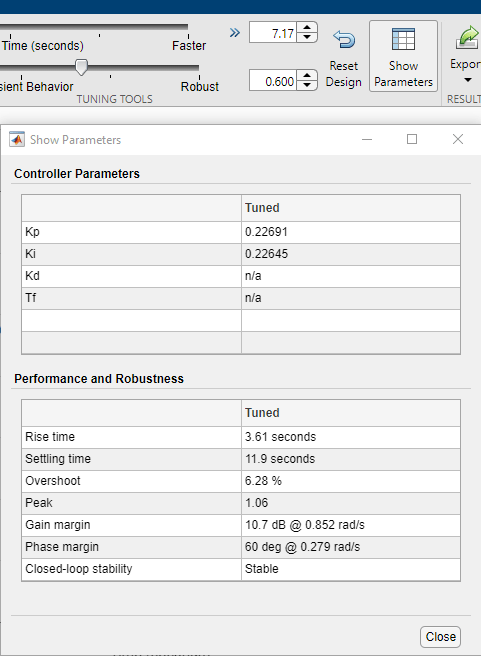
对于阶跃参考跟踪,设定时间约为12秒,超调量约为6.3%,这在本例中是可接受的。
抗干扰整定PID
假设在设备输入端出现阶跃干扰,PI控制器的主要目的是快速抑制该干扰。在本节的其余部分中,我们将展示如何设计PI控制器以更好地抑制PID调谐器中的干扰。我们还预计,参考跟踪性能会随着干扰的出现而降低性能提高。
由于低频干扰的衰减与积分增益Ki成反比,因此最大化积分增益是获得具有良好干扰抑制能力的PI控制器的一种有用的启发式方法。有关背景信息,请参阅Karl Astrom等人,“高级PID控制”,第4章“控制器设计”,2006年,ISA协会。
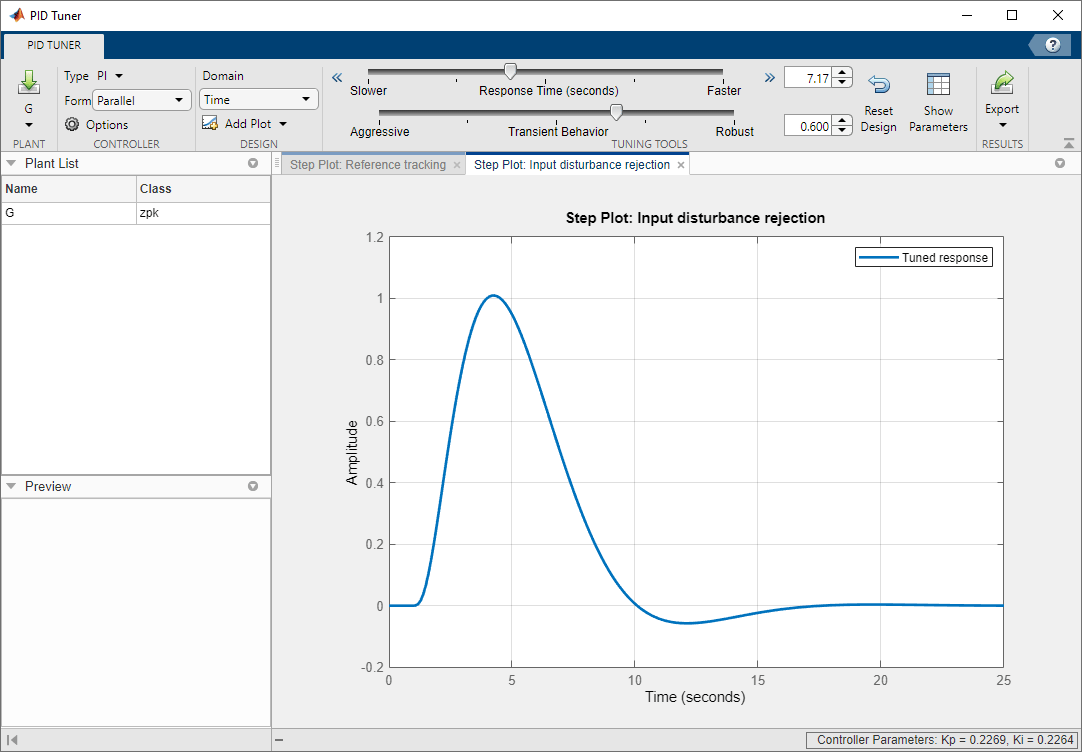
点击添加绘图选择输入干扰抑制,然后单击添加绘制输入扰动阶跃响应。峰值偏差约为1,并在约9秒内稳定到小于0.1。

平铺曲线图以显示参考跟踪和输入干扰响应。向右移动响应时间滑块以提高响应速度(开环带宽)。在控制器参数表先增大后减小,最大值出现在0.3处。当Ki为0.3时,峰值偏差减小到0.9(约10%改善),并在约6.7秒内稳定到小于0.1(约25%改善)。
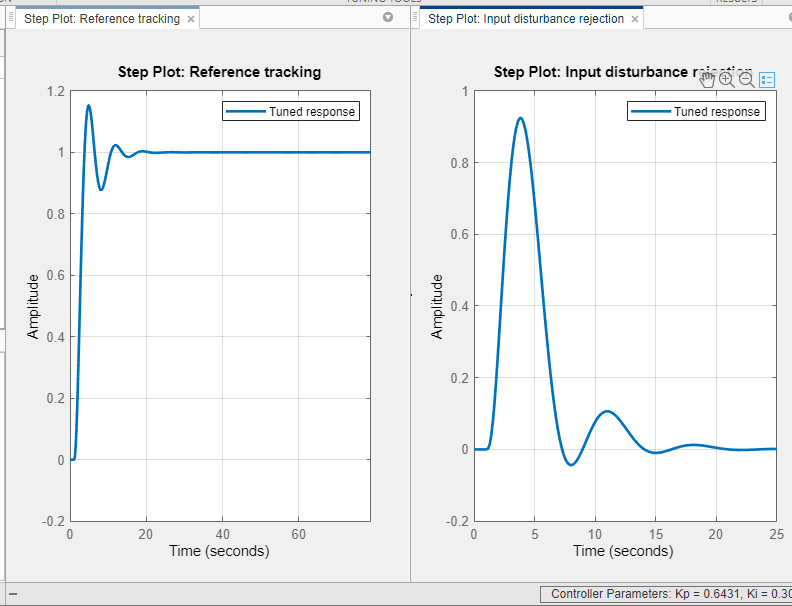
由于我们增加了带宽,阶跃参考跟踪响应变得更加振荡。此外,超调量超过15%,这通常是不可接受的。由于单个PID控制器无法同时满足两个设计目标,因此在参考跟踪和干扰抑制之间经常存在这种性能折衷这是同时发生的。
点击出口将设计的PI控制器导出到MATLAB工作区。控制器由PID对象表示,您需要它在下一节中创建ISA-PID控制器。

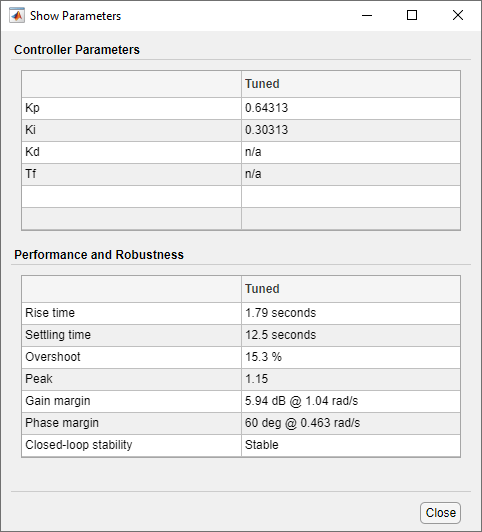
您还可以使用pid在该命令中,您可以直接指定从PID调谐器的参数表中获得的Kp和Ki增益。
C=pid(0.64362,0.30314);C.InputName=“e”;C.输出名称=“你”C
C=1 Kp+Ki*--s,Kp=0.644,Ki=0.303连续时间并联PI控制器。
将PID控制器扩展到ISA-PID控制器
要使PI控制器在参考跟踪和干扰抑制方面都表现良好,一个简单的解决方案是将其升级为ISA-PID控制器。它通过提供额外的调优参数来改进参考跟踪响应B这允许独立控制参考信号对比例动作的影响。

在上述ISA-PID结构中,有一个反馈控制器C和一个前馈滤波器F。在本例中,C是一个并行形式的常规PI控制器,可由PID对象表示:
F是一个预滤器,包括来自C的Kp和Ki增益加上设定点权重B:
因此,ISA-PID控制器有两个输入(r和y)和一个输出(u)。
设定值重量B是介于0和1之间的实数。当它减小时,参考跟踪响应中的超调量减小。在本例中,B选择为0.7。
b=0.7;%下面的代码从F和C构造ISA-PIDF=tf([b*C.Kp C.Ki],[C.Kp C.Ki]);F.InputName=“r”;F.输出名称=“uf”;总和=sumblk(“e”,“uf”,“是的”,'+-');IsAPI=连接(C,F,和{“r”,“是的”},“你”);tf(ISPID)
ans=从输入“r”到输出“u”:0.4505秒^2+0.5153秒+0.1428--------------------秒^2+0.471秒从输入“y”到输出“u”:-0.6436秒-0.3031----------秒连续时间传递函数。
比较性能
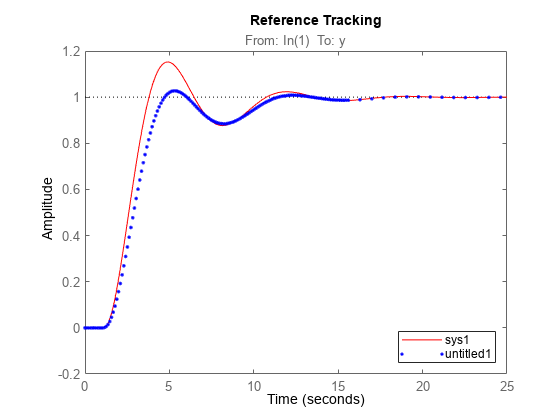
ISA-PID控制器的参考跟踪响应由于设定点权重而具有更小的超调量B减少过冲。
%用于参考跟踪的带PI控制器的闭环系统sys1=反馈(G*C,1);%采用ISA-PID控制器的闭环系统sys2=连接(ISPID,G{“r”,“你”},“是的”);%比较反应步骤(sys1,“r-”,sys2(1),“b.”);传奇(“表演”,“位置”,‘东南’)头衔(“参考跟踪”)
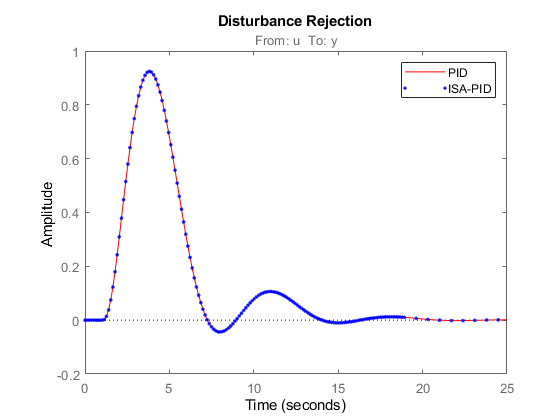
干扰抑制响应是相同的,因为设定点权重B仅影响引用跟踪。
%具有PI控制器的抗干扰闭环系统sys1=反馈(G,C);%比较反应步骤(sys1,“r-”,sys2(2),“b.”);传奇(“PID”,“ISA-PID”);头衔(“干扰抑制”)
您还可以从以下列表中选择网站:
