747®喷气式飞机的偏航阻尼器设计
本例展示了使用控制系统工具箱™中的经典控制设计功能为747®飞机设计的偏航阻尼器。

在巡航飞行中飞机的简化模型


有四个州:
贝塔(侧滑角),phi(倾斜角),偏航率,横摇率
和两个输入:方向舵和副翼偏转。
所有的角和角速度都用弧度和弧度/秒表示。
给定trim模型的矩阵A、B、C、D,使用SS命令在MATLAB®中创建状态空间模型:
= (-。0558 -。9968年.0802 .0415;.598 -。115 -。0318 0;-3.05 .388 -。4650 0;0 0.0805 1 0];(.00729 B = 0;-0.475 - 0.00775;0.153 - 0.143; 0 0]; C=[0 1 0 0; 0 0 0 1]; D=[0 0; 0 0]; sys = ss(A,B,C,D);
并标记输入、输出和状态:
集(sys,“inputname”, {“舵”副翼的},...“outputname”, {“偏航率”“银行角”},...“statename”, {“β”“偏航”“滚”“φ”});
这个模型有一对轻微阻尼的极点。他们对应的是所谓的荷兰卷模式。要查看这些模式,请输入
轴(gca),“正常”h = pzplot(sys);setoption (h,“FreqUnits”,“rad / s”,“网格”,“关闭”);

右击并选择“Grid”来绘制阻尼和固有频率值。你需要设计一个补偿器来增加这两个极点的阻尼。
从开环分析开始,确定可能的控制策略。轻阻尼模态的存在通过“观察脉冲响应”得到了证实:
impulseplot(系统)
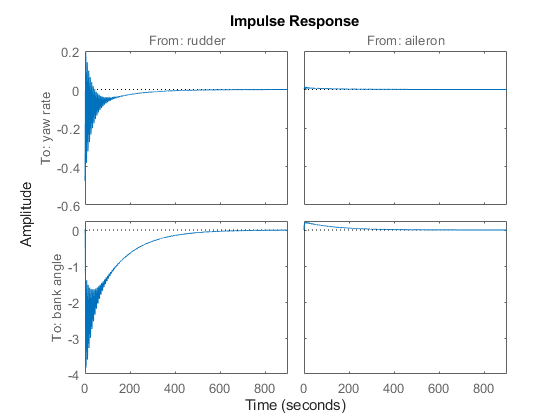
要在20秒的较短时间内检查响应,您还可以输入
impulseplot (sys, 20)
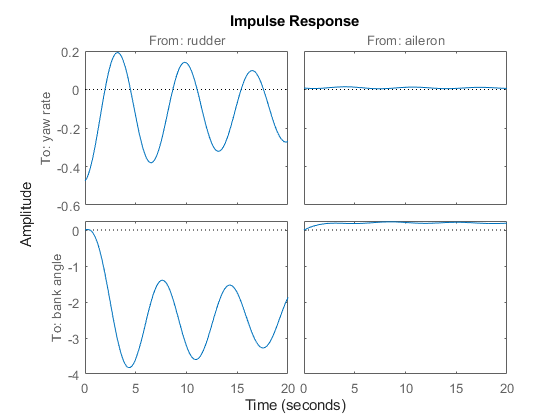
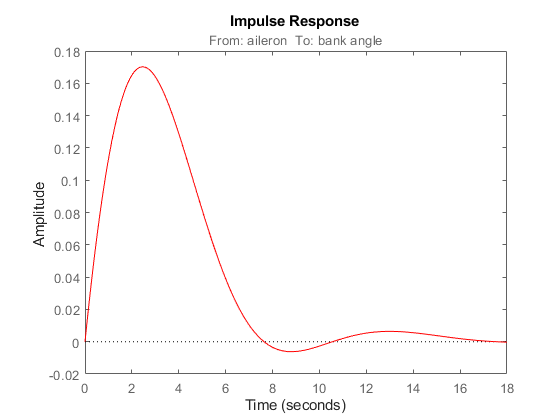
看一下从副翼到岸角的图。要仅显示此图,右键单击并选择“I/O选择器”,然后单击(2,2)项。
这张图显示飞机在一个非零的倾斜角附近摇摆。因此飞机在副翼的推动下转向。这种行为在后面会很重要。
典型的偏航阻尼器是利用偏航率作为传感器输出,方向舵作为输入。检查这个I/O对的频率响应:
sys11 =系统(“偏航”,“舵”);%选择I/O对h = bodeplot (sys11);setoption (h,“FreqUnits”,“rad / s”,“MagUnits”,“数据库”,“PhaseUnits”,“度”);

这张图显示,方向舵在轻微阻尼的荷兰横摇模式(1 rad/s)下有很大的权威。
合理的设计目标是提供阻尼比zeta > 0.35,固有频率Wn < 1.0 rad/s。最简单的补偿器是增益。使用根轨迹技术选择适当的反馈增益值:
h = rlocusplot (sys11);setoption (h,“FreqUnits”,“rad / s”)

糟糕,看来我们需要积极的反馈!
h = rlocusplot (-sys11);setoption (h,“FreqUnits”,“rad / s”)
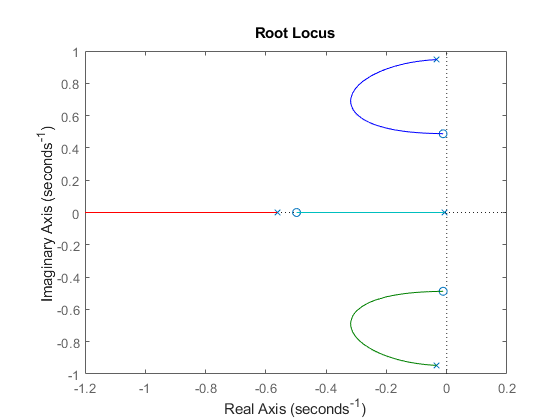
这看起来更好。点击蓝色曲线,移动黑色方块来跟踪增益和阻尼值。当增益K=2.85时,闭环系统的最佳可达阻尼约为0.45。
现在关闭这个SISO反馈回路,看看脉冲响应
k = 2.85;cl11 =反馈(sys11 - k);
注:反馈默认为负反馈
impulseplot (sys11“b——”cl11,“r”)传说(“开环”,“闭环”,“位置”,“东南”)
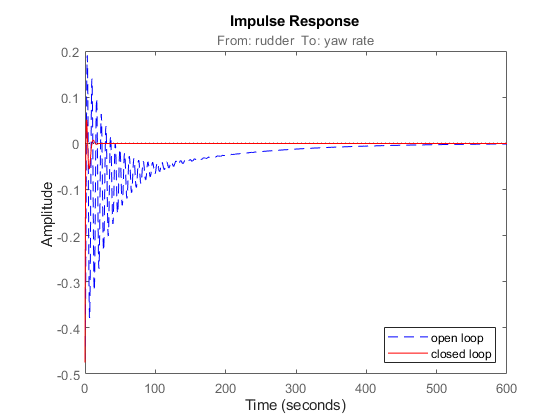
反响看起来不错。
现在关闭整个MIMO模型的循环,看看副翼的响应是怎样的。反馈回路涉及到工厂的输入1和输出1:
砰声=反馈(sys - k 1,1);impulseplot (sys,“b——”砰声,“r”,20)% MIMO脉冲响应
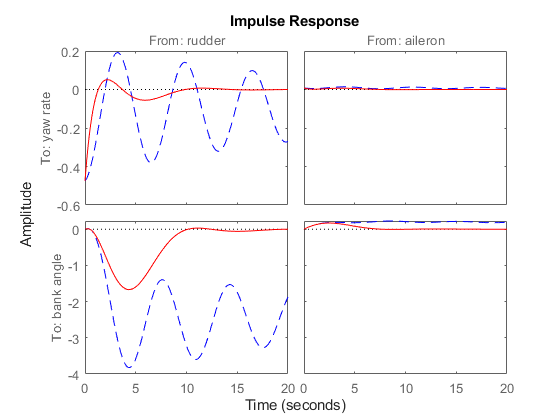
偏航率响应现在得到了很好的阻尼。
然而,当移动副翼时,系统不再像普通飞机那样继续倾斜
impulseplot(砰声(“银行角”,副翼的),“r”,18)
你已经过度稳定了螺旋模式。螺旋模式通常是一种非常慢的模式,允许飞机在没有固定副翼输入的情况下倾斜和转弯。飞行员习惯了这种行为,不会喜欢不正常飞行的设计。
你需要确保当我们关闭循环时,螺旋模式不会深入到左半边平面。飞行控制设计人员解决这个问题的一个方法是使用冲洗过滤器。
冲洗过滤器:

使用SISO设计工具(help sisotool),您可以图形化地调整参数k和a,以找到最佳组合。在本例中,我们选择a = 0.2或5秒的时间常数。
a=0.2 k=1的洗脱滤波器
H = zpk (0、-0.2、1);
将冲洗量与设计模型串联,利用根轨迹确定滤波器增益k:
oloop = H * (-sys11);%的开环h = rlocusplot (oloop);setoption (h,“FreqUnits”,“rad / s”)sgrid

对于k=2.34,最好的阻尼是zeta = 0.305。用MIMO模型关闭回路,检查脉冲响应:
k = 2.34;wof = -k * H;%冲刷补偿器砰声=反馈(sys wof 1,1);impulseplot (sys,“b——”砰声,“r”,20)
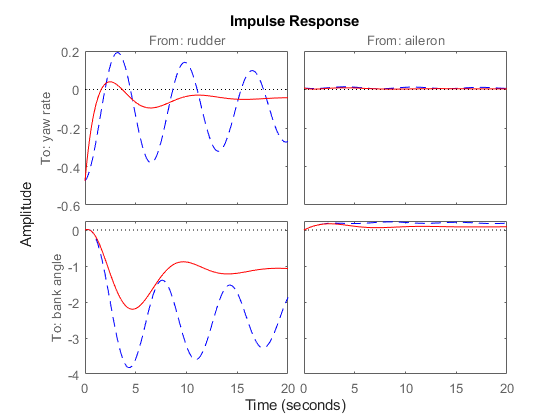
冲洗过滤器还恢复了正常的倾斜和转弯行为,正如看到的脉冲响应从副翼到银行的角度。
impulseplot (sys (2, 2),“b——”砰声(2,2)“r”,20)传说(“开环”,“闭环”,“位置”,“东南”)
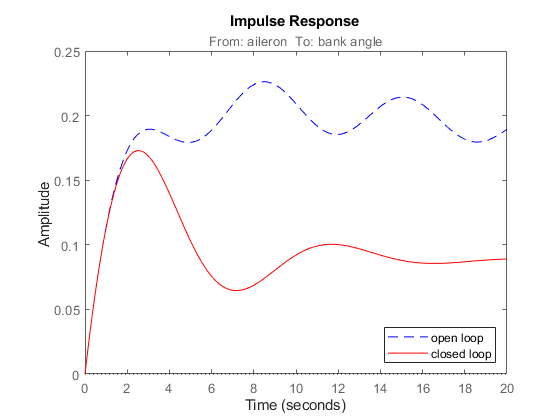
虽然它不太符合要求,但这种设计大大增加了阻尼,同时允许飞行员正常驾驶飞机。
你也可以从以下列表中选择一个网站:
