主要内容
freqsep
慢快中子分解
描述
例子
将模型分解为快动态和慢动态
加载一个动态系统模型。
负载numdemoPd波德(Pd)
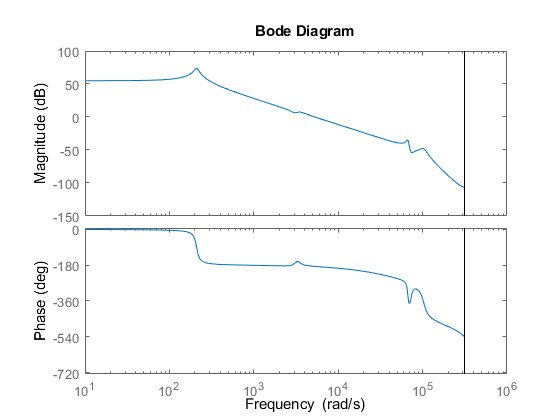
Pd有四个复极和一个实极。波德图显示了210 rad/s左右的共振和10000 rad/s以下的高频共振。
在1000 rad/s左右分解这个模型来分离这两个共振。
(Gs, Gf) = freqsep (Pd, 10 ^ 3);波德(Pd、Gs、Gf)传说(“原始”,“慢”,“快”,“位置”,“西南”)
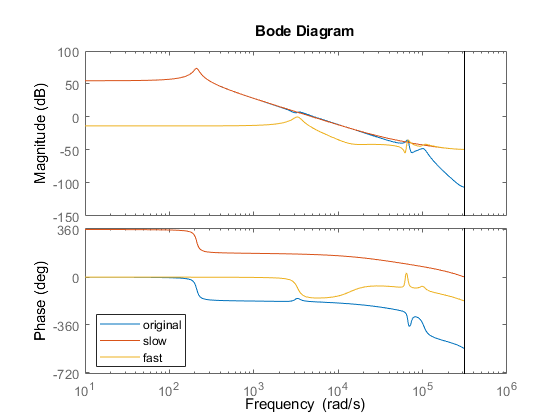
波德图显示慢分量,Gs,只包含低频共振。该元件也与原始模型的直流增益相匹配。快速组件,女朋友,包含高频共振,并与原始模型在高频下的响应相匹配。两个分量的和Gs +女朋友生成原始模型。
通过调整容差来分离相邻模式
将模型分解为极之间紧密间隔的慢和快组件。
下面的系统包括一个实极和一个复极对,都是接近的年代= 2。
[-1.9999 -2+1e-4i],10);
尝试将模型分解为2 rad/s左右,使慢分量包含实极,快分量包含复极。
(Gs, Gf) = freqsep (G, 2);
警告:一个或多个快速模式不能从慢模式中分离出来。为了强制分离,通过增加“SepTol”因子来放松精度约束(详见“freqsepOptions”)。
这些杆子靠得太近了freqsep和他分开。增加相对容差以允许分离。
选择= freqsepOptions (“SepTol”5 e10);(Gs, Gf) = freqsep (G, 2、期权);
现在freqsep成功分离动力。
slowpole =杆(Gs)
slowpole = -1.9999
fastpole =杆(Gf)
fastpole =2×1复杂-2.000 - 0.0001i
输入参数
输出参数
介绍了R2014a
你也可以从以下列表中选择一个网站:
