HL-20自动驾驶仪中的角速率控制
这是用于HL-20车辆飞行控制系统的设计和调整的示例系列的第2部分。这部分涉及关闭控制身体角速率的内部环路。
控制架构
使用其飞行控制系统打开HL-20模型。
Open_System('csthl20_control')
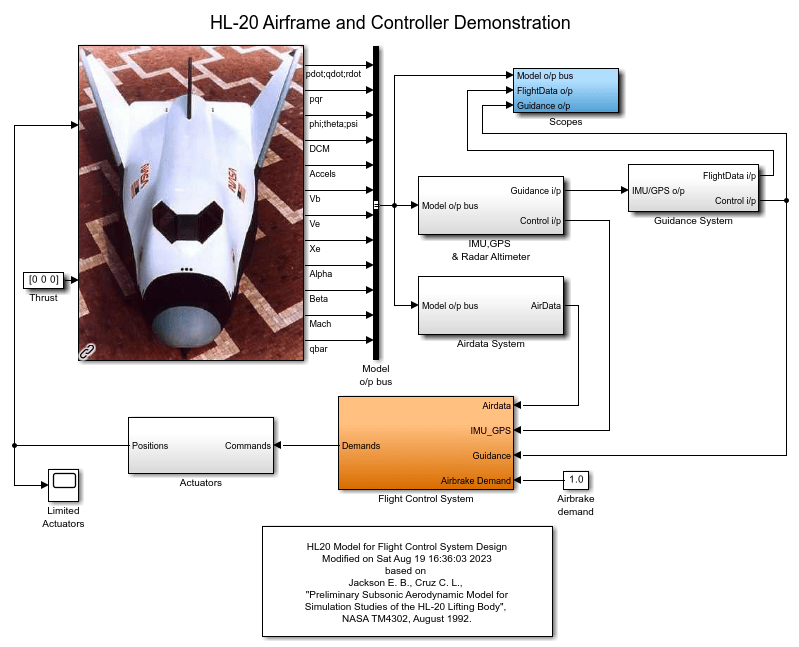
这款6-DOF模型适用于NASA HL-20升降机身机身(航空航天块集)。该模型配置为模拟着陆站点的最终方法。“指导系统”生成滑坡轨迹和相应的辊,攻角(alpha)和侧滑角(β)命令。“飞行控制系统”是任务调整控制表面以跟踪这些命令。“飞行控制系统”内的“控制器”块是具有不同自动驾驶单元配置的变体子系统。
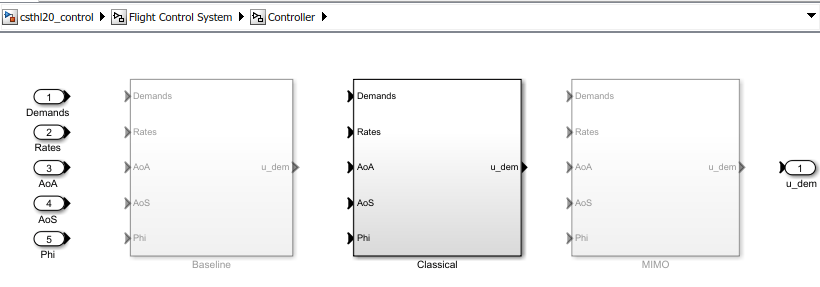
“基线”和“古典”控制器使用具有三个内部P-ock循环的经典级联环路架构来控制角速率P,Q,R和三个外部PI环路,以控制角度位置PHI,alpha,β。六种比例增益和三个积分增益全部安排为alpha和beta的函数。“基线”变量包含基线设计NASA HL-20升降机身机身(航空航天块集)。本系列的第2和第3部分使用“古典”变体穿过调谐过程。活动变量由工作区变量CTYPE控制。将其值设置为2以激活控制器的“古典”变体。
%选择控制器的“古典”变体ctype = 2;%呼叫模型更新以确保在线化期间仅分析主动变量信号set_param('csthl20_control'那'simulationcommand'那'更新');
请注意,此变体使用查找表和MATLAB功能块的混合来安排自动驾驶仪增益。

控制器调整设置
本系列的第1部分(HL-20机身的修剪和线性化),我们获得了“HL20机身”和“控制选择器”块的线性化模型,用于40种不同的飞机取向(40对(α,β)值对)。加载这些线性化模型阵列。
加载csthl20_trimdata.G7.CS尺寸(g7)
8x5状态空间模型数组。每个模型都有34个输出,9个输入和7个状态。
尺寸(cs)
8x5状态空间模型数组。每个模型有6个输出,5个输入和0个状态。
这SLTUNER.接口是获取适用于控制系统设计和分析的“CSTHL20_CONTROL”的线性化模型的便捷方式。通过此接口,您可以指定模型中的信号和感兴趣点,并指定要调整的块。
st0 = sltuner('csthl20_control');st0.ts = 0;%要求连续时间线性化
这里的兴趣点包括角度和速率要求,相应的反应和偏转DA,de,DR。
AP = {'da; de; dr''HL20机身/ PQR''alpha_deg''beta_deg''phi_deg''控制器/古典/需求'%角度需求'p_demand''q_demand''r_demand'};ST0.Adpoint(AP)
由于我们已经获得了“HL20机身”和“控制选择器”块的线性化模型作为(alpha,beta),最简单的方式来线性化整个型号“CSTHL20_CONTROL”是通过一系列线性替换每个非线性组件楷模。这被称为“块替换”,通常是在多种操作条件下线心化复杂模型的最有效方法。
%通过8×5线性化模型G7取代“HL20机身”块。blocksub1 = struct('名称'那'CSTHL20_CONTROL / HL20 AIRFRAME'那'价值',G7);%通过CS替换“控制选择器”blocksub2 = struct('名称'那'CSTHL20_CONTROL /飞行控制系统/控制选择器'那'价值',CS);%通过直接馈通更换“执行器”(忽略饱和和二阶执行器动态)blocksub3 = struct('名称'那'CSTHL20_CONTROL /执行器'那'价值',眼睛(6));st0.blocksubstitutions = [blocksub1;blocksub2;blocksub3];
您现在已准备好进行控制设计部分。
关闭内圈
从控制角速率P,Q,R的三个内部环开始。要导向,请将开环传输功能从偏转(da,de,dr)绘制到角速率(p,q,r)。与之SLTUNER.接口,您可以查询型号的型号以获取任何感兴趣的传递函数。
%注意:第二个'da; de; des'在植物输入上打开所有反馈循环gpqr = getiotransfer(st0,'da; de; dr'那'pqr'那'da; de; dr');BODE(GPQR(1,1),GPQR(2,2),GPQR(3,3),{1E-1,1E3}),网格传奇('da到p'那'de to q'那'去r')

该BODE PLOT表明对角线条款表现为超过5 rad / s之外的集成商(达到标志)。这可以使用仅比例控制来证明。与基线设计一致,将P,Q,R循环的目标带宽分别设置为30,22.5和37.5 rad / s。每个(α,β)值的收益Kp,Kq,kr易于从这些频率的植物频率响应获得,并且相位图表明KP应该是正(负反馈)和KQ,KR应该是负的(正面反馈)。
%计算kp,kq,kr为每个(alpha,beta)条件。结果阵列%有大小[1 1 8 5]kp = 1./abs(evalfr(gpqr (1,1),30i)));kq = -1./abs(日见列难(GPQR(2,2))));kr = -1./abs(日见列(公(GPQR)));BODE(GPQR(1,1)* KP,GPQR(2,2)* KQ,GPQR(3,3)* KR,{1E-1,1E3}),网格图例('da到p'那'de to q'那'去r')

要结束内圈设计,请将这些增益值推到Simulink模型中的相应查找表并刷新金宝appSLTUNER.目的。
mws = get_param('csthl20_control'那'modelworkspace');mws.assignin('kp',挤压(kp))mws.assignin('kq',挤压(kq))mws.assignin('kr',挤压(kr))刷新(st0)
接下来,您需要调整控制卷,攻角和侧滑角的外环。本系列的第3部分(HL-20 AutoPilot中的态度控制 - Siso设计)显示如何调整经典SISO架构和第4部分(HL-20 AutoPilot - MIMO设计中的态度控制 - MIMO设计)调查MIMO架构的好处。
相关话题
您还可以从以下列表中选择一个网站:
