使用控制系统设计器入门
此示例显示了如何使用反馈控制系统的补偿器控制系统设计.
使用控制系统设计你可以:
1)根据时间,频率和杆/零响应图定义控制设计要求。
2)曲调补偿器使用:
自动设计方法,如PID调谐,IMC和LQG。
在设计图中的图形曲调杆和零,例如BODE和ROOT LOCU。
基于优化的控制设计,满足Simulink®设计优化™的时域和频域要求。金宝app
3)可视化闭环和开环响应,动态更新显示控制系统性能。
补偿器设计问题
针对此实例,设计了系统的补偿器
具有以下设计要求:
零稳态误差相对于步进输入。
80%的上升时间不到1秒。
稳定时间不到2秒。
最大过冲不到20%。
开环交叉频率小于5 rad / s。
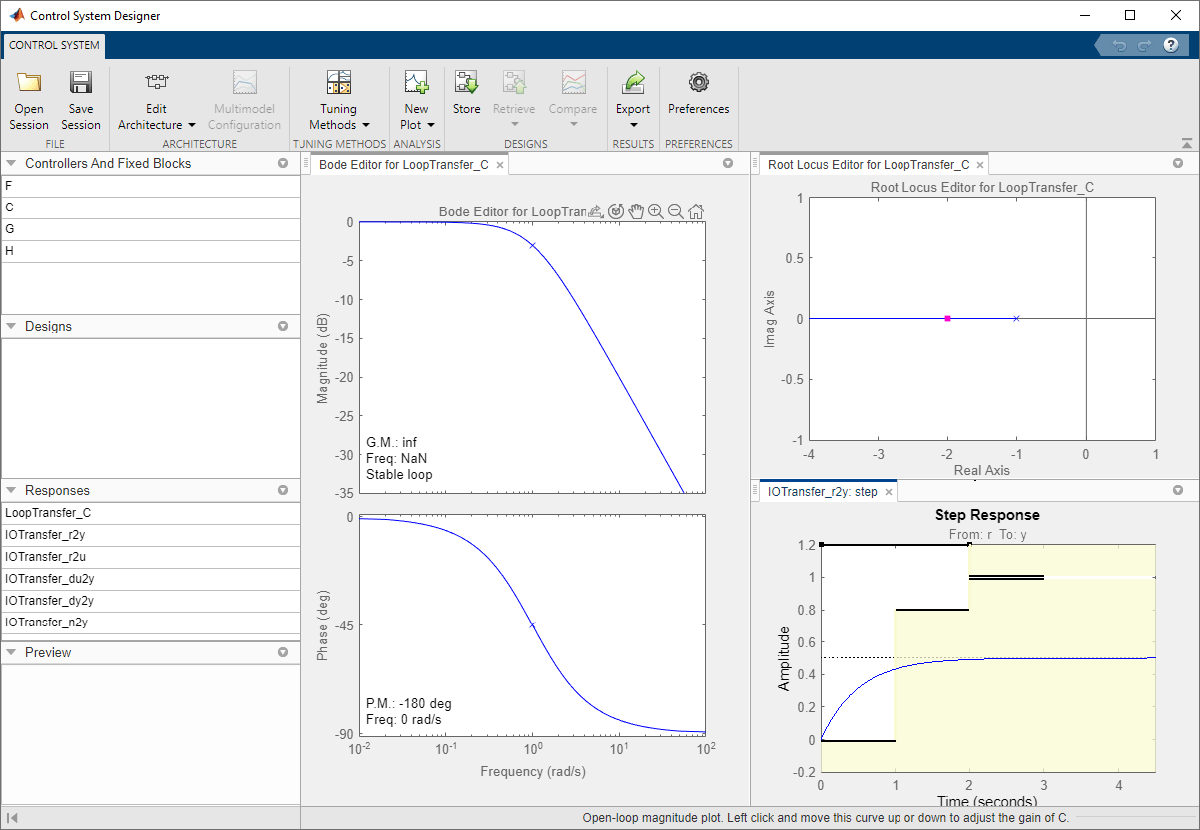
开放式控制系统设计器
使用标准反馈结构在前向路径中使用控制器。此结构是默认值控制系统设计建筑。
开放控制系统设计用指定的植物。
ControlSystemDesigner(TF(1,[1,1]))

在这一点控制系统选项卡,您可以选择补偿器调优方法,并创建响应图来分析控制器性能。您还可以存储、比较和导出不同的控制系统设计。
在此示例中,以图形方式使用您的补偿器根轨迹编辑器和开环波德编辑器,并使用闭环验证设计阶段响应.默认情况下,控制系统设计在打开时显示这些响应。要添加其他响应情节,请单击新的剧情.
添加设计要求
将时域设计要求添加到阶段响应情节。右键单击绘图区域,然后选择设计要求>新.当设计需求类型下拉列表,选择步骤响应绑定.输入时间域设计要求。

点击好吧.该应用程序将设计要求添加到阶跃响应图中,作为阴影排除区域。为了满足要求,阶跃响应必须留在该区域之外。
要指定频域交叉要求,请右键单击波德编辑器绘图区域,选择设计要求>新.当设计需求类型下拉列表,选择上限限制,并指定设计要求。
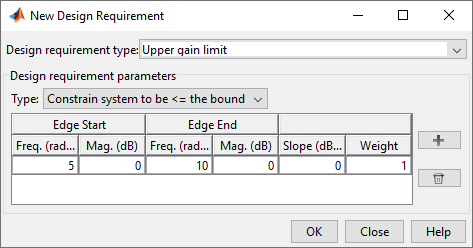
点击好吧.
曲调赔偿者
为了满足零稳态误差的设计要求,在补偿器中增加了积分器。右键单击根轨迹编辑器绘图区域,选择添加极点/零>积分器.
要为根轨迹图创建一个理想的形状,请在-2附近添加真正的零。右键单击根轨迹绘图区域并选择添加杆/零>真实零.在根轨迹图中,左键单击-2附近的真实轴。
中通过增加补偿器增益来创建更快的响应波德编辑器,向上拖动幅度响应。为了满足交叉频率要求,将响应保持在BODE编辑器中的排除区域以下。

要查看补偿器,右键单击波德编辑器或根轨迹编辑器绘图区域,选择编辑补偿器.

您还可以使用“补偿器编辑器”对话框调整补偿器参数。
自动补偿器调整
除了图形调谐之外,还可以使用自动调整方法。要选择自动调整方法,请单击调整方法.
PID调整那IMC调整,LQG综合-根据闭环时间常数等调整参数计算初始补偿器参数。例如,看到使用控制系统设计器设计LQG跟踪器.
基于优化的调谐- 使用时间域和频域设计要求优化补偿器(需要Simulink设计优化)。金宝app例如,看到直流电机控制器调整(金宝appSimulink设计优化).
循环形成- 指定所需的目标循环形状(需要强大的控制工具箱™)。
您还可以从以下列表中选择一个网站:
