绘图系统的反应
这个例子展示了如何绘制SISO和MIMO线性系统的时间和频率响应。
时间反应
为了演示,创建以下三阶传递函数:
Sys = tf([8 18 32],[1 6 14 24])
sys = 8 s ^ 2 + 18 + 32 ----------------------- s ^ 3 + 6 s ^ 2 + 14 + 24连续时间传递函数。
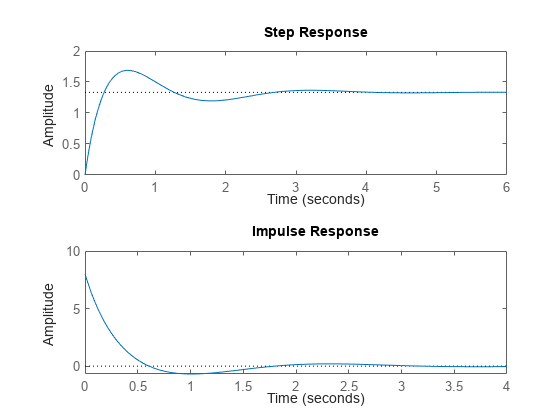
你可以画出这个系统的阶跃和脉冲响应用一步和冲动命令:
Subplot (2,1,1) step(sys) Subplot (2,1,2) impulse(sys)
您也可以模拟对任意信号(例如,正弦波)的响应lsim命令。输入信号显示为灰色,系统响应显示为蓝色。
CLF t = 0:0.01:4;u =罪(10 * t);lsim (sys, u, t)定义输入信号

您可以对连续或离散TF、SS或ZPK模型使用绘图命令。对于状态空间模型,您还可以绘制一些给定初始状态的非强制响应,例如:
A = [-0.8 3.6 -2.1;-3 -1.2 4.8;3 -4.3 -1.1];B = [0;-1.1;-0.2);C = [1.2 0 0.6];D = -0.6;G = ss (A, B, C, D);x0 = (1; 0; 2);%初始状态初始网格(G, x0)

频率响应
频域分析是理解控制系统稳定性和性能特性的关键。波德图、奈奎斯图和尼科尔斯图是绘制和分析线性系统频率响应的三种标准方法。可以使用波德,尼克尔斯,尼奎斯特命令。例如:
Sys = tf([8 18 32],[1 6 14 24])
sys = 8 s ^ 2 + 18 + 32 ----------------------- s ^ 3 + 6 s ^ 2 + 14 + 24连续时间传递函数。
波德(sys)网格

尼奎斯特(sys)网格

尼科尔斯(sys)网格

极点/零映射和根轨迹
系统的极点和零点包含关于其动力学、稳定性和性能极限的有价值的信息。例如,考虑图1中的反馈循环


图1: SISO反馈回路。
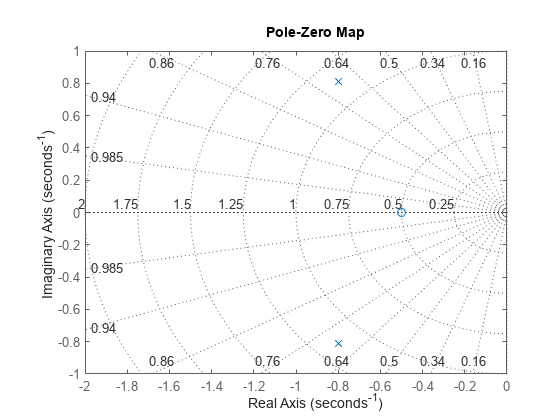
对于增益值k = 0.7,你可以用下面的方法绘制闭环极点和零pzmap:
s =特遣部队(“年代”);G = - (2 * (s + 1) / (s ^ 2 + 3 * s + 2);k = 0.7;T =反馈(G * k, 1);pzmap(T)网格,轴([-2 0 -1 1])

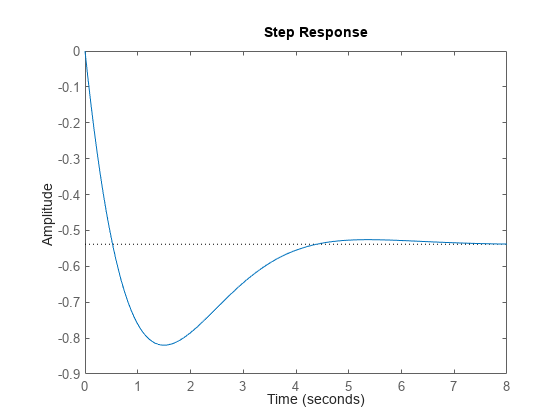
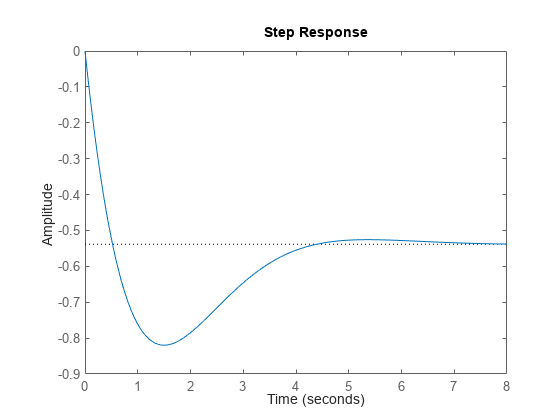
闭环极点(用蓝色的x标记)位于左半平面,因此反馈环路对于选择增益是稳定的k.你可以从这个图表中读出闭环极点的阻尼比(见径向线上的标签)。这里的阻尼比约为0.7,表明闭环响应具有良好的阻尼,如:
clf步骤(T)
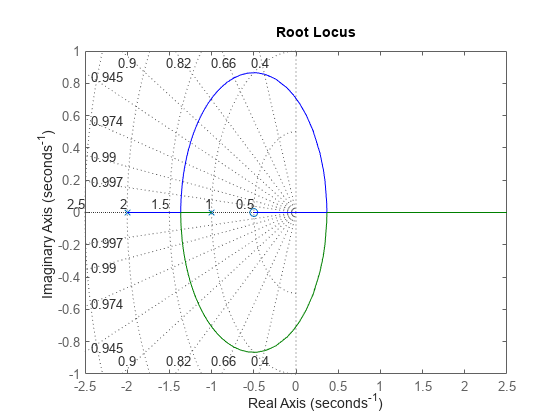
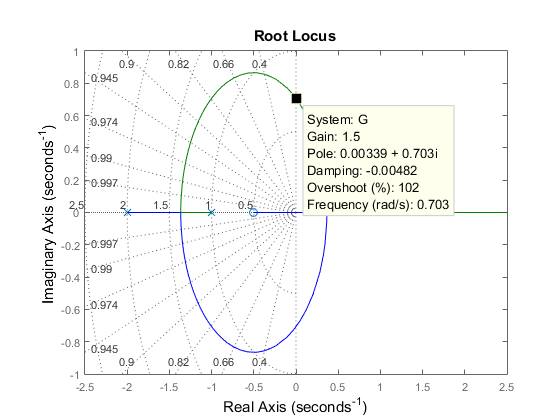
进一步了解环路增益如何k影响闭环稳定性,你可以绘制闭环极点的轨迹作为的函数k:
rlocus (G)网格
点击轨迹与y轴的交点,闭环极点变得不稳定k = 1.51.所以闭环稳定的环路增益应该保持在1.5以下。

响应特性
右键单击响应图可以访问各种选项和注释。特别是,特征菜单让您显示标准指标,如上升时间和稳定时间的阶跃响应,或峰值增益和稳定裕度的频率响应图。
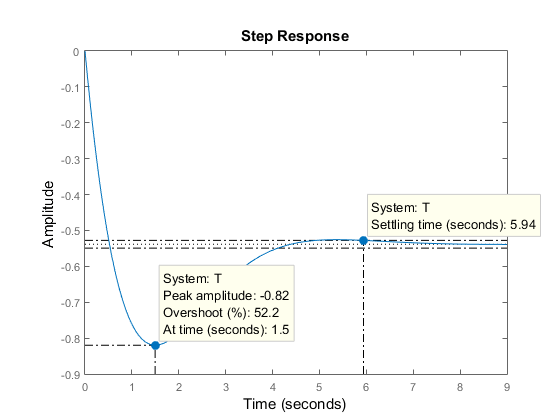
使用上一节的例子,绘制闭环阶跃响应:
步骤(T)
现在,在图上右键显示峰值响应和稳定时间特征,点击蓝点读取相应的超调和稳定时间值:

分析了MIMO系统
到目前为止提到的所有命令都完全支持多输入多输出(MIMO)系统。金宝app在MIMO的情况下,这些命令生成绘图数组。例如,双输入双输出系统的阶跃响应
sys = rss (3 2 2);sys。A = [-0.5 -0.3 -0.2;0 -1.3 - -1.7;0.4 1.7 -1.3);
是一个2 × 2的图形数组,其中每一列显示特定输入通道的阶跃响应:
步骤(系统)
如果需要,您可以将所有四个响应分组到一个plot上,方法是右键单击该plot并选择I/O分组-> All子菜单。结果图如下所示。

以下附加图对分析MIMO系统很有用:
奇异值图(
σ),显示频率响应的主要增益每个输入/输出对的极点/零位图(
iopzplot)
例如,绘制的峰值增益sys作为频率的函数:
σ(sys)网格
比较系统
您可以使用任何响应绘图命令一次绘制多个系统。您可以为每个系统指定特定的颜色、标记或线条样式,以便进行比较。使用上面的反馈例子,绘制闭环阶跃响应的三个环路增益值k有三种不同的颜色:
k1 = 0.4;T1 =反馈(G * k1, 1);k2 = 1;T2 =反馈(G * k2, 1);步骤(T)“b”T1,“r”, T2,‘g’)传说(“k = 0.7”,“k = 0.4”,“k = 1”)
另请参阅
相关的话题
你也可以从以下列表中选择一个网站:
