ROILabelData
ROI标签的地面真实数据
描述
的ROILabelData对象中存储每个信号的感兴趣区域(ROI)标签定义的地面真值数据地面多路信号对象。
创造
当您导出地面多路信号来自地面真理贴标机应用程序会话,ROILabelData属性将ROI标签存储为ROILabelData对象。创建ROILabelData对象编程时,使用vision.labeler.labeldata.ROILabelData函数(这里描述)。
描述
输入参数
信号名- - - - - -信号的名字
字符串数组
信号名称,指定为字符串数组。中出现的所有信号的名称地面多路信号对象。您可以从现有的名称获取信号名称地面多路信号通过访问数据源属性。使用此命令并替换格特鲁斯写着你的名字地面多路信号对象变量。
gTruth.DataSource.SignalName
在一个出口地面多路信号对象,ROILabelData对象包含每个信号的标签数据属性,即使某些信号没有ROI标签数据。
所创建的属性ROILabelData对象中指定的名称信号名.
例子:[“视频\u 01\u城市\u c2s\u fcw\u 10s”“lidarSequence”]
唇形目- - - - - -每个信号的ROI标签数据
Cell数组的时间表
每个信号的ROI标签数据,指定为时间表的单元格数组。单元格数组中的每个时间表都包含位于相应位置的信号数据信号名输入。的ROILabelData对象将每个时间表存储在与该信号具有相同名称的属性中。
每个信号的时间表格式取决于来自地面多路信号导出或正在创建的对象。
每个时间表包含存储在中的每个标签定义的一列LabelDefinitions财产地面多路信号对象。排除信号类型不支持的标签定义。例如,假设您定义了金宝app行ROI标签命名为“莱恩”.激光雷达点云信号的时间表不包括车道列,因为这些信号不支持金宝app行ROI标签。在数据源财产地面多路信号对象,SignalType属性列出有效的信号类型。
时间表的高度是由信号中的时间戳的数量定义的。在数据源财产地面多路信号对象,时间戳属性列出信号时间戳。
对于每个标签定义,在该时间戳标记的所有ROI标签将组合到表中的单个单元格中。考虑存储在地面多路信号对象,格特鲁斯.在每个时间戳,汽车包含三个标签,卡车包含一个标签,和车道包含两个标签。
gTruth.ROILabelData.video_01_city_c2s_fcw_10s
5×4 4个时间表时间时间时间时间时间时间时间时间时间时间时间时间时间时间时间时间时间时间时间时间时间时间时间时间汽车、卡车、汽车、汽车、卡车、汽车、卡车、汽车、汽车、汽车、卡车、汽车、汽车、汽车、汽车、汽车、卡车、汽车、汽车、汽车、卡车、汽车、汽车、汽车、汽车、UUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUUU\\\\厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄厄{2×1细胞}0.15秒{3×4双细胞}{1×4双细胞}{2×1细胞}0.2秒{3×4双细胞}{1×4双细胞}{2×1细胞}
ROI标签数据的存储格式取决于标签类型。
| 标签类型 | 标签在每个时间戳的存储格式 |
|---|---|
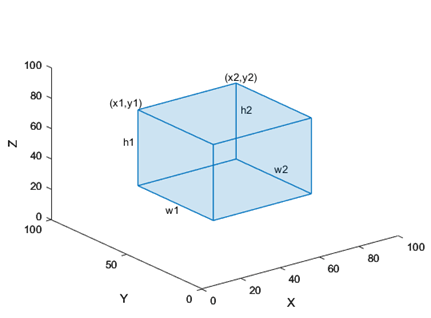
labelType。矩形 |
|
|
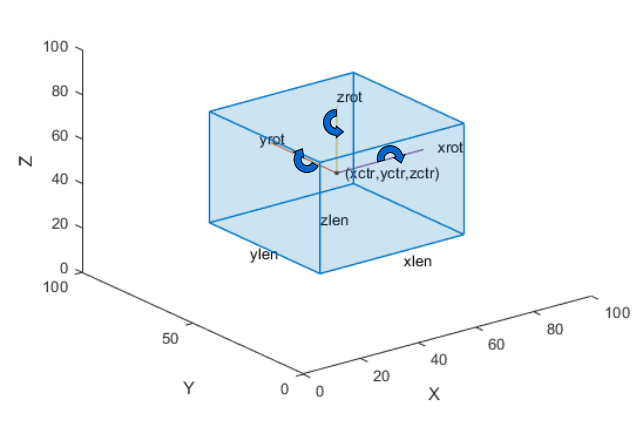
该图显示了这些值如何确定长方体的位置。
|
|
该图显示了这些值如何确定长方体的位置。
|
labelType。行 |
|
labelType。PixelLabel |
所有像素标签定义的标签数据存储在一个单独的米-by-1 |
labelType。多边形 |
|
labelType。自定义 |
标签的存储方式与时间表中指定的完全相同。如果导入 |
如果ROI标签数据包括子标签或属性,则每个时间戳处的标签必须指定为结构。
| 标签结构字段 | 描述 | ||||||
|---|---|---|---|---|---|---|---|
位置 |
父标签在给定时间戳处的位置 格式 |
||||||
AttributeName1,…,AttributeNameN |
父标签的属性 每个定义的子标签都有自己的字段,字段的名称对应于属性名。属性值是一个字符向量 |
||||||
SublabelName1,…,SublabelNameN |
父标签的子标签 每个定义的子标签都有自己的字段,字段的名称对应于子标签的名称。每个子标签字段的值是一个结构,其中包含给定时间戳下所有具有该名称的标记子标签的数据。 该表描述了子标签结构的格式。
|
性质
例子
你也可以从以下列表中选择一个网站:
