主要内容
幅度角度HDL优化复合
复杂信号的计算幅度和相位角度 - 使用CORDIC算法针对HDL码生成进行了优化
- 库:
DSP系统工具箱HDL支持/数学函数金宝app
描述
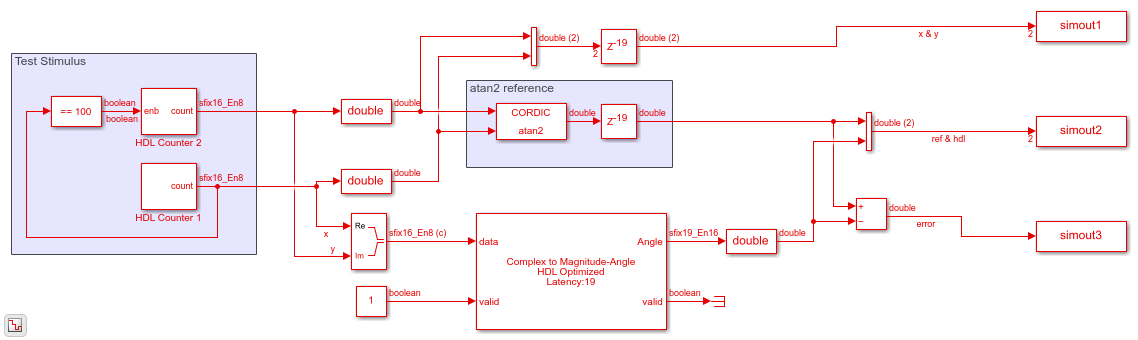
的幅度角度HDL优化复合块计算复杂信号的幅度和相位角,并提供硬件友好的控制信号。为了实现高效的HDL实现,块使用流水线坐标旋转数字计算机(CORDIC)算法。
您可以使用这个块来实现诸如量化在硬件。
港口
输入
输出
参数
模型的例子
算法
体系结构
该块生成一个流水线的HDL体系结构以最大化吞吐量。每个CORDIC迭代都在一个管道阶段完成。增益乘法器,如果启用,是用规范有符号数字(CSD)逻辑实现的。
如果您使用向量输入,则此块将为向量的每个元素并行地复制此架构。

下表显示级和角度输出字长(WL),特定输入字长(WL)。FL代表在固定点表示中使用的分数长度。
| 输入单词长度 | 字长 |
|---|---|
| fixdt(0,西城,FL) | fixdt(0,王+ 2,FL) |
| fixdt(1、WL FL) | fixdt(1,王+ 1,FL) |
| 输入单词长度 | 输出角度 | |
|---|---|---|
| Fixdt([],WL,FL) | 弧度 | fixdt(1、王+ 3、西城) |
| 标准化 | FixDT(1,WL + 3,WL + 2) | |
每个管道阶段的CORDIC逻辑实现一次迭代。对于每个管道阶段,位移和角度旋转都是常数。

当您设置输出格式来级,该块不会为角度累积和象限校正逻辑生成HDL代码。
归一化角度格式
这种格式将单位圆周围的定点弧度角值标准化。这种位的使用可能比使用范围[0,2 π]弧度更有效。此外,这种标准化的角度格式可以在0或2π角的环绕,而不需要额外的检测和校正逻辑。
例如,表示具有3比特的角度导致这些归一化值。

该块对[0,π/4]的角度进行归一化,并在计算结束时将它们映射到正确的八象限。
扩展功能
另请参阅
复杂Magnitude-Angle(金宝app模型)|dsp。HDLComplexToMagnitudeAngle|量化
介绍了R2014b
你也可以从以下列表中选择一个网站: