LMS Update
Estimate weights of LMS adaptive filter
- Library:
DSP System Toolbox / Filtering / Adaptive Filters
Description
TheLMS Updateblock estimates the weights of an LMS adaptive filter. The block accepts the data and error as inputs and computes the filter weights based on the algorithm the block chooses. For more details on the algorithms, seeAlgorithms.
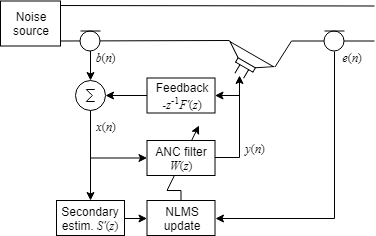
You can use this block to compute the adaptive filter weights in applications such as system identification, inverse modeling, and filtered-x LMS algorithms, which are used in acoustic noise cancellation. For more details, seeReferences.
Ports
Input
Output
Parameters
Model Examples
Block Characteristics
Data Types |
|
Direct Feedthrough |
|
Multidimensional Signals |
|
Variable-Size Signals |
|
Zero-Crossing Detection |
|
Algorithms
The block computes filter weight estimates using .
The function is defined according to the LMS algorithm you specify through theAlgorithmparameter:
LMS—Normalized LMS—In the
Normalized LMSalgorithm,εis a small positive constant that overcomes the potential numerical instability in the update of weights.For double-precision floating-point inputs,εis
2.2204460492503131e-016. For single-precision floating-point inputs,εis1.192092896e-07. For fixed-point input,εis 0.Sign-Error LMS—Sign-Data LMS— , whereu(n) is realSign-Sign LMS— , whereu(n) is real
In the previous equations:
n— The current time index
u(n) — The vector of buffered input samples at stepn
u*(n) — The complex conjugate of the vector of buffered input samples at stepn
w(n) — The vector of filter weight estimates at stepn
e(n)— The estimation error at stepn
µ— The adaptation step size
α— The leakage factor (0 ≤ α ≤ 1)
References
[1] Madisetti, Vijay, and Douglas Williams. "Introduction to Adaptive Filters."The Digital Signal Processing Handbook.Boca Raton, FL: CRC Press, 1999.
[2] Akhtar, M. T., M. Abe, M. Kawamata. "Modified-filtered-x LMS algorithm based active noise control systems with improved online secondary-path modeling." IEEE Symposium on Circuits and Systems, 2004.
Extended Capabilities
See Also
Blocks
Objects
Select a Web Site
Choose a web site to get translated content where available and see local events and offers. Based on your location, we recommend that you select:.
Selectweb siteYou can also select a web site from the following list:
Americas
- América Latina(Español)
- Canada(English)
- United States(English)
Europe
- Belgium(English)
- Denmark(English)
- Deutschland(Deutsch)
- España(Español)
- Finland(English)
- France(Français)
- Ireland(English)
- Italia(Italiano)
- Luxembourg(English)
- Netherlands(English)
- Norway(English)
- Österreich(Deutsch)
- Portugal(English)
- Sweden(English)
- Switzerland
- United Kingdom(English)