FIR滤波器的归一化LMS算法辨识
为了提高LMS算法的收敛性能,归一化变量(NLMS)采用了基于信号功率的自适应步长。随着输入信号功率的变化,算法计算输入功率并调整步长以保持一个合适的值。由于步长随时间变化,因此,在许多情况下,标准化算法收敛速度更快,样本更少。对于随时间缓慢变化的输入信号,归一化LMS算法可以是一种更有效的LMS方法。
有关使用LMS方法的示例,请参见基于LMS算法的FIR滤波器系统辨识.
请注意:如果你使用R2016a或更早的版本,用等价的step语法替换对对象的每个调用。例如,obj (x)就变成了步骤(obj, x).
未知的系统
创建一个dsp。FIRFilter对象,表示要标识的系统。使用fircband函数来设计滤波器系数。所设计的滤波器是一个低通滤波器,阻带纹波限制在0.2。
filt = dsp.FIRFilter;filt。分子= fircband(12,[0 0.4 0.5 1],[1 1 0 0],[1 0.2],...{' w '“c”});
通过信号x到FIR滤波器。所需的信号d是未知系统(FIR滤波器)的输出和加性噪声信号的总和n.
x = 0.1 * randn (1000 1);n = 0.001 * randn (1000 1);D = filt(x) + n;
自适应滤波器
若要使用归一化LMS算法变异,则设置方法财产的dsp。LMSFilter来“归一化LMS”.设置自适应滤波器的长度为13点,步长为0.2。
μ= 0.2;lms = dsp。LMSFilter(13,“StepSize”亩,“方法”,...“归一化LMS”);
通过一次输入信号x想要的信号d到LMS过滤器。
[y, e, w] = lms (x, d);
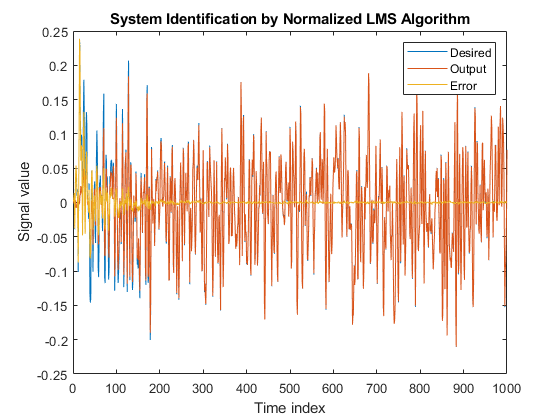
输出y自适应滤波器的作用是将信号收敛到期望信号d从而使误差最小化e在两个信号之间。
情节(1:1000 [d, y, e])标题(“标准化LMS算法的系统识别”)传说(“想要的”,“输出”,“错误”)包含(“时间指数”) ylabel (的信号值)
比较自适应滤波器和未知系统
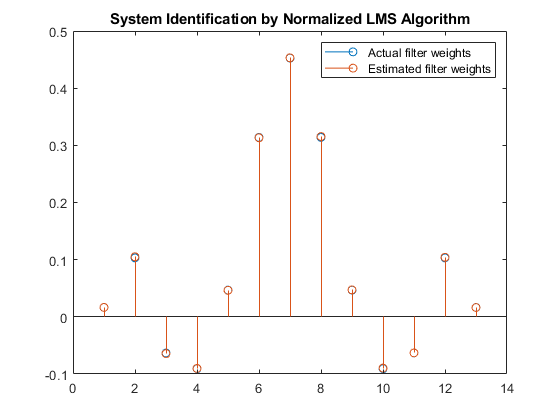
权向量w表示LMS滤波器(FIR滤波器)的系数,该滤波器适应于类似未知系统(FIR滤波器)。为了确定收敛性,比较FIR滤波器的分子和自适应滤波器的估计权值。
茎([(filt.Numerator)。' w])标题(“标准化LMS算法的系统识别”)传说(实际滤波器权重的,“估计滤波器权重”,...“位置”,“东北”)
另请参阅
对象
相关的话题
参考文献
Monson H. Hayes,统计数字信号处理与建模“,.《中国日报》,1996年第3期。
[2]微积分,西门,自适应滤波器理论.上鞍河,新泽西:普伦蒂斯-霍尔公司,1996。
你也可以从以下列表中选择一个网站: