马尔可夫链混合时间进行比较
这个例子比较了估计混合的时候几个具有不同结构的马尔可夫链。通常需要遍历unichains收敛定理。因此,在比较混合时间的估计,这个例子确保遍历unichains马尔可夫链。
混合链
创建一个23-state马尔可夫链的随机转移矩阵包含250不可行的529总转换的转换。一个不可行的过渡是一个过渡的发生的概率是零。画一个有向图的马尔可夫链和识别类通过使用节点颜色和标记。
rng (1);%的再现性numStates = 23;Zeros1 = 250;mc1 = mcmix (numStates“零”,Zeros1);图;graphplot(哪“ColorNodes”,真正的);
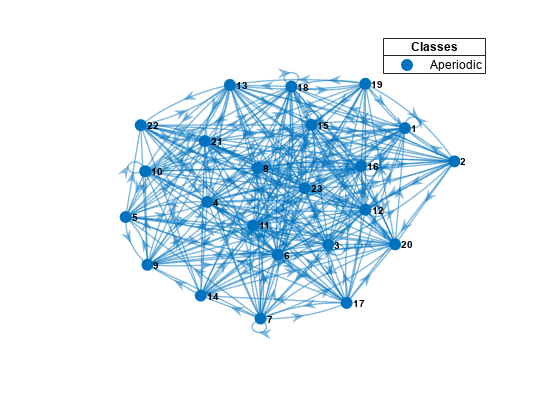
哪代表一个unichain因为它是一个周期性,周期类。
确定马尔可夫链遍历。
tf1 = isergodic(哪)
tf1 =逻辑1
tf1 = 1表明哪表示一个遍历unichain。
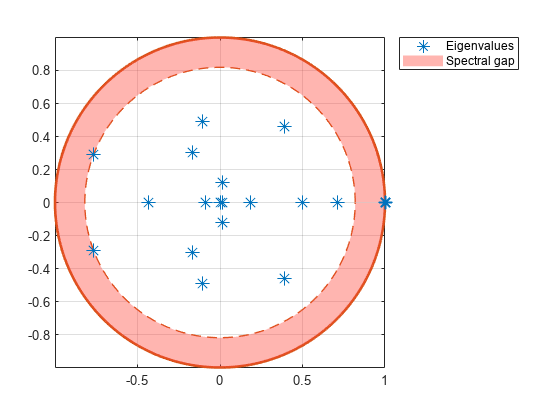
情节的特征值马尔可夫链在复平面上。
图;eigplot(哪);
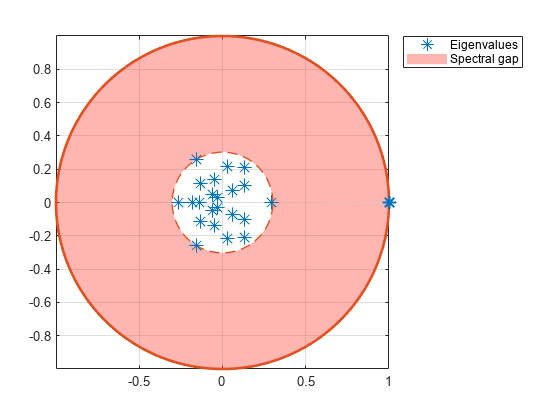
情节中的粉色盘显示光谱差异(两个最大特征值模之间的差异)。光谱的差距决定了马尔可夫链的混合时间。表明混合速度,差距太大而薄的差距表明混合慢。在这种情况下,差距很大,表明混合链。
估计的混合时间链。
[~,tMix1] =渐近(哪)
tMix1 = 0.8357
平均要花0.8357步骤的总变异距离衰减的一个因素
。
首中时预期的目标状态是另一种视图混合的马尔可夫链。按时间计算不需要遍历马尔可夫链。
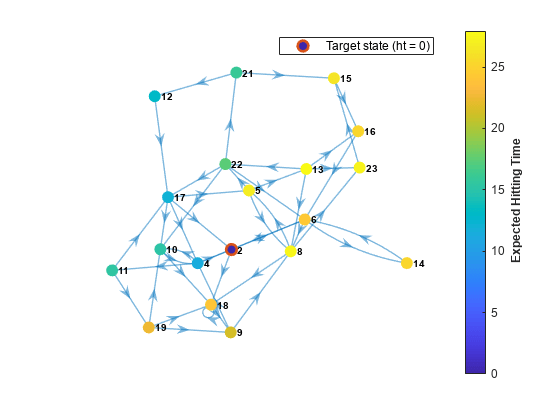
画一个马尔可夫链与节点的有向图的颜色代表预期的第一打次政权。
hittime (mc1 1“图”,真正的);
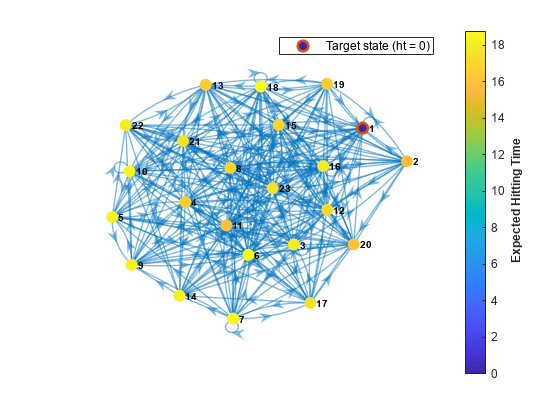
预期第一撞击时间政权从政权开始2大约是16次步骤。
Slow-Mixing链
创建另一个23-state马尔可夫链的随机转移矩阵包含475不可行的转换。用更少的可行的转换,这个链应该混的时间较长。画一个有向图的马尔可夫链和识别类通过使用节点颜色和标记。
Zeros2 = 475;mc2 = mcmix (numStates,“零”,Zeros2);图;graphplot (mc2,“ColorNodes”,真正的);
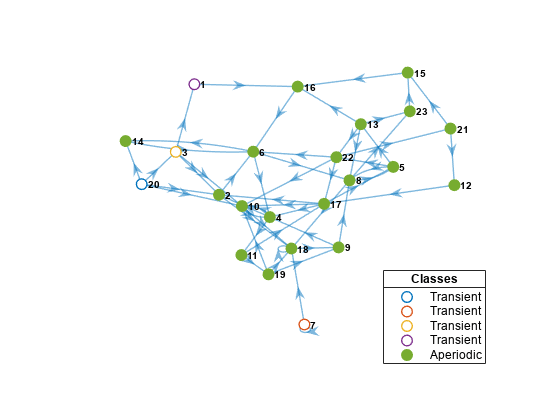
mc2代表一个unichain因为它有一个单一的、周期性,周期类和几个瞬态类。
确定马尔可夫链遍历。
tf2 = isergodic (mc2)
tf2 =逻辑0
tf2 = 0表明mc2不是遍历。
提取的子链mc2。确定子链遍历。
[垃圾箱,~,ClassRecurrence] =分类(mc2);recurrentClass =找到(ClassRecurrence, 1);recurrentState =找到((垃圾箱= = recurrentClass), 1);星际2 =子链(mc2, recurrentState);星际2 tf2 = isergodic ()
tf2 =逻辑1
星际2表示一个遍历unichain。
情节复平面上的子链的特征值。
图;eigplot(星际2);
子链的光谱差异比的差距更薄哪,这表明子链混合得更慢。
估计子链的混合时间。
星际2 [~,tMix2] =渐近()
tMix2 = 5.0201
平均要花5.0201步骤的总变异距离衰减的一个因素
。
画一个马尔可夫链与节点的有向图的颜色代表预期的第一政权打次复发的子类。
sc2.StateNames (1)
ans = " 2 "
星际2 hittime (1“图”,真正的);
预期的第一个政权2从政权开始8打时间大约30次的步骤。
哑铃链混合时间
创建一个“哑铃”马尔可夫链包含10个州在每个“重量”和三个州的“酒吧”。
指定随机状态之间的转移概率在每个的重量。
如果马尔可夫链达到国家的重量接近酒吧,然后指定一个高概率过渡的酒吧。
在酒吧里指定统一的状态之间的转换。
w = 10;%哑铃DBar = [0 1 0;1 0 1;0 1 0];%哑铃杆DB = blkdiag(兰德(w), DBar,兰德(w));%转移矩阵%连接哑铃重量和酒吧DB (w w + 1) = 1;DB (w + 1, w) = 1;DB (w w + 3, + 4) = 1;DB (w + 4, w + 3) = 1;mc3 = dtmc (DB);
情节哑铃链的一个有向图和识别类通过使用节点颜色和标记。抑制节点标签。
图;h = graphplot (mc3“ColorNodes”,真正的);h。NodeLabel = {};
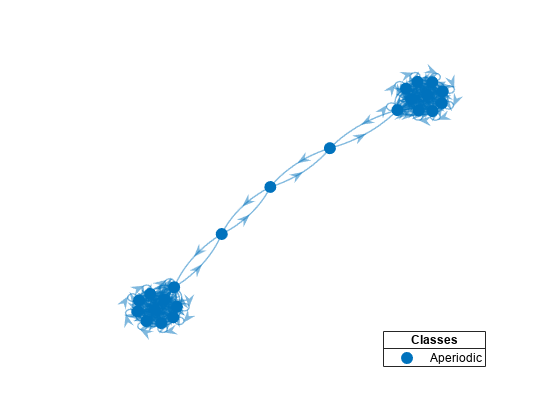
mc3代表一个unichain因为它有一个单一的、周期性,周期类。
确定马尔可夫链遍历。
tf3 = isergodic (mc3)
tf3 =逻辑1
tf3 = 1表明mc3遍历。
情节的特征值哑铃在复平面上。
图;eigplot (mc3);
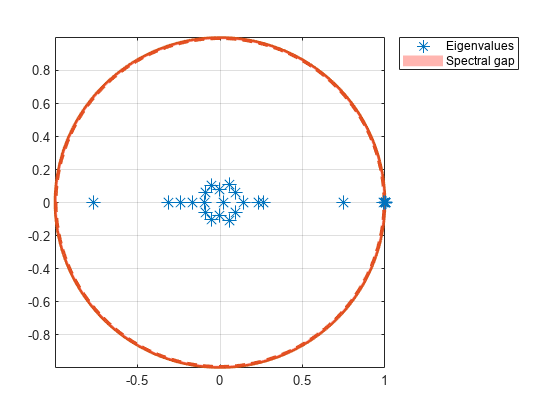
子链的光谱差异很薄,这表明哑铃链混合非常缓慢。
估计哑铃链的混合时间。
[~,tMix3] =渐近(mc3)
tMix3 = 90.4334
平均要花90.4334步骤的总变异距离衰减的一个因素
。
画一个马尔可夫链与节点的有向图的颜色代表预期的第一打次政权。
hittime (mc3 1,“图”,真正的);
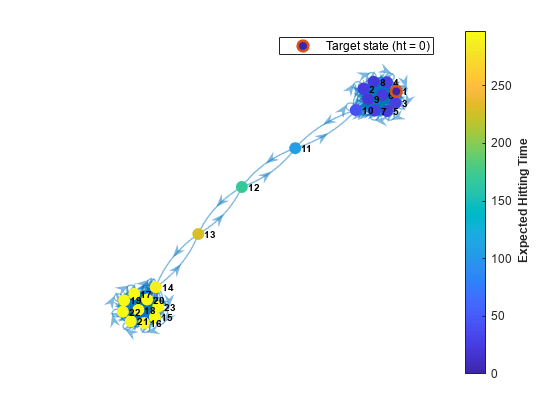
预期第一撞击时间政权从政权开始15 300时间步。