主要内容
使用剩余滤波检测传感器读数中的噪声
此示例显示了如何使用residualgps目标函数和残差滤波检测时,新的传感器测量可能与当前的滤波状态不一致。
负载轨迹和传感器数据
加载MAT-fileloggedDataWithutiPath.mat..该文件包含模拟IMU和GPS数据以及一个圆形轨迹的地面真实位置和方向。GPS数据中包含了由于轨迹某一段的多径误差引起的误差。这些误差通过在GPS数据中加入白噪声来模拟城市峡谷的影响。
负载(“loggedDataWithMultipath.mat”,...“imuFs”,'Accel','陀螺',...% IMU数据'GPSFS',“lla”,“gpsVel”,...%GPS读数“truePosition”,“trueOrientation”,...地面真实姿态'localorigin',“initialState”,“multipathAngles”)%每个GPS样本的IMU样本数。imusamplespergps =(imufs / gpsfs);对应于多径错误的名字和最后一个索引。multipathindices = [1850 2020];
融合滤波器
创建两个姿态估计过滤器使用insfilternonholoromic.对象。使用一个过滤器来处理所有传感器读数。使用另一个滤波器只处理不被认为是离群值的传感器读数。
%创建过滤器。%使用此过滤器仅处理未检测到的传感器读数%异常值。gndfusionwithdetection = insfilternonholoromic(“ReferenceFrame”,'enu',...“IMUSampleRate”,imufs,...“ReferenceLocation”localOrigin,...“DecimationFactor”2);%使用此过滤器处理所有传感器读数,无论是否或不是,他们是离群值。GNDFusionNodetection = InsfilternOnHoloric(“ReferenceFrame”,'enu',...“IMUSampleRate”,imufs,...“ReferenceLocation”localOrigin,...“DecimationFactor”2);% GPS测量噪声。Rvel = 0.01;rpo = 1;这个过滤器的地面车辆的动态模型假设有运动时无侧滑或打滑。这意味着速度是%被限制为仅前身体轴。另外两个速度轴%读数用零测量进行校正,由%| ZerovelocityConstraintNoise |范围。gndFusionWithDetection。ZeroVelocityConstraintNoise = 1飞行;gndFusionNoDetection。ZeroVelocityConstraintNoise = 1飞行;%过程噪音。gndfusionwithdetection.gyroscopenoise = 4e-6;gndfusionwithdetection.gyroscopdbiasnoise = 4e-14;gndfusionwithdetection.acceleromernoise = 4.8e-2;gndfusionwithdetection.accelerometerbiasnoise = 4e-14;gndfusionnodetection.gyroscopenoise = 4e-6;gndfusionnodetection.gyroscopdbiasnoise = 4e-14;gndfusionnodetection.acceleromernoise = 4.8e-2;gndfusionnodetection.accelerometerbiasnoise = 4e-14;%初始滤波器状态。gndfusionwithdetection.state = initialstate;gndfusionnodetection.state = initialstate;%初始错误协方差。gndFusionWithDetection。StateCovariance = 1 e-9 * 1 (16);gndFusionNoDetection。StateCovariance = 1 e-9 * 1 (16);
初始化范围
的HelperPoseViewer范围允许3-D可视化比较过滤估计和地面真理。使用多个范围可以减慢模拟。要禁用范围,请将相应的逻辑变量设置为假.
usePoseView = true;%打开3D姿势查看器如果usePoseView [viewerWithDetection, viewerNoDetection, annoHandle]...= HelperCreatePoseViewers(InitialState,MultiPathangles);结束
仿真环路
主要的仿真回路是为循环与嵌套为循环。第一个循环在gpsFs,即GPS测量速率。对象处执行嵌套循环IMUFS.,即IMU采样率。每个范围都按照IMU采样率更新。
numsamples = numel(tryerverientation);numgpssamples = numsamples / imusamplespergps;最终度量计算的%日志数据。estPositionNoCheck = 0 (numsamples, 3);estOrientationNoCheck =四元数。0 (numsamples, 1);estPosition = 0 (numsamples, 3);estOrientation =四元数。0 (numsamples, 1);%离群残差的阈值。residualThreshold = 6;idx = 0;为sampleIdx = 1: numGPSSamplesIMU更新频率下%预测循环。为i = 1:imusamplespergps idx = idx + 1;%使用预测方法估计基于过滤器状态%在accelData和gyroData阵列上。预测(gndFusionWithDetection accel (idx:),陀螺(idx:));预测(gndFusionNoDetection accel (idx:),陀螺(idx:));%记录估计的方向和位置。[estpositionNocheck(IDX,:),estorientationNocheck(IDX,:)]...=姿势(gndFusionWithDetection);: [estPosition idx), estOrientation (idx:)]...=姿势(GNDFusionNodetection);%更新姿态查看器。如果UpployView ViewerWithDetection(estpositionNocheck(IDX,:),...estorientationNocheck(IDX,:),...trueposition(idx,:),triace主管(idx,:));视网膜级(estposition(idx,:),...estOrientation (idx:), truePosition (idx:)...Triace主顾(IDX,:));结束结束%该代码的下一部分以GPS采样率运行。%基于GPS数据更新过滤器状态。fusegps (gndFusionWithDetection lla (sampleIdx:), rpo,...gpsVel (sampleIdx:), Rvel);%检查当前GPS读数的标准化残余。如果是%值太大,它被认为是一个异常值并被忽视。[res, resCov] = residualgps(gndFusionNoDetection, lla(sampleIdx,:),...RPOS,GPSVel(SampleIdx,:),rvel);Incormalizedres = Res(1:3)./ SQRT(DIAG(RESCOV(1:3,1:3))。');如果(所有(abs (normalizedRes) < = residualThreshold))%基于GPS数据更新过滤器状态。fusegps (gndFusionNoDetection lla (sampleIdx:), rpo,...gpsVel (sampleIdx:), Rvel);如果usePoseView集(annoHandle,“字符串”,'异常值状态:无',...“EdgeColor”,'K');结束别的如果usePoseView集(annoHandle,“字符串”,'异常值状态:检测到',...“EdgeColor”,“r”);结束结束结束


错误度量计算
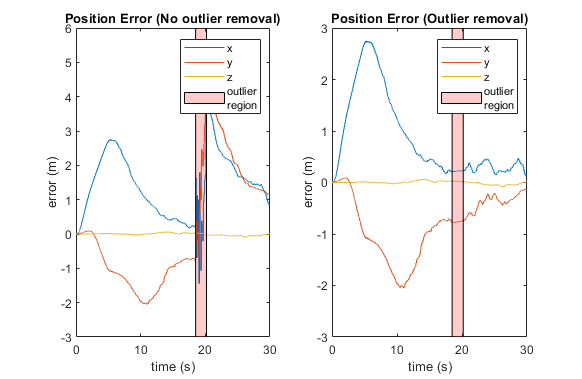
计算滤波器估计的位置误差。滤波器中的位置误差增加,不会检查GPS测量中的任何异常值。
%计算位置误差。posdnocheck = estpositionnocheck - trueposition;posd = estthosition - trueentosition;%绘图结果。t =(0:大小(posd, 1) 1)。”。/ imuFs;图('单位',“归一化”,'位置', [0.2615 0.2833 0.4552 0.3700]) subplot(1, 2, 1) plot(t, posdNoCheck) ax = gca;yLims =得到(ax,“YLim”);抓住上mi = multipathIndices;填充([t (mi(1))、t (mi(1))、t (mi(2))、t (mi (2))], [7 5 5 7),...(1 0 0),“FaceAlpha”, 0.2);集(ax,“YLim”,ylims);标题('位置错误(删除异常值)')xlabel('时间'')ylabel('错误(m)')传说('X','是','Z'sprintf ('异常\ nregion'))子图(1,2,2)绘图(t,posd)ax = gca;yLims =得到(ax,“YLim”);抓住上mi = multipathIndices;填充([t (mi(1))、t (mi(1))、t (mi(2))、t (mi (2))], [7 5 5 7),...(1 0 0),“FaceAlpha”, 0.2);集(ax,“YLim”,ylims);标题(位置错误(离群值移除))xlabel('时间'')ylabel('错误(m)')传说('X','是','Z'sprintf ('异常\ nregion')))
结论
的residualgps在使用它们以更新滤波器状态之前,可以使用对象功能来检测传感器测量中的潜在异常值insfilternonholoromic.对象。其他姿势估计滤波器对象,如,insfilterMARG,insfilterasync., 和insfilterErrorState也有类似的目标函数来计算传感器测量残差。
您还可以从以下列表中选择一个网站: