rcsSignature
描述
rcsSignature创建一个雷达截面(RCS)签名对象。你可以使用这个对象模型angle-dependent和频率相关雷达截面模式。雷达横截面决定从目标反射雷达信号功率强度。对象模型的极化和无极的信号。对象支持几个Swerl金宝apping波动模型。
创建
描述
rcssig= rcsSignaturercsSignature对象的默认属性值。
rcssig= rcsSignature (名称,值)名称,值对参数。的名字是一个属性名称和价值相应的价值。的名字必须出现在单引号(”)。您可以指定几个名称-值对参数在任何顺序Name1, Value1,…,的家。任何未指定的属性默认值。
请注意
你只能设置属性值rcsSignature当构建对象。属性值不变化后施工。
属性
例子
雷达横截面的椭球体
指定的雷达截面(RCS)三轴椭球体和情节RCS值在一个方位。
指定长度的轴椭球。单位是米。
一个= 0.15;b = 0.20;c = 0.95;
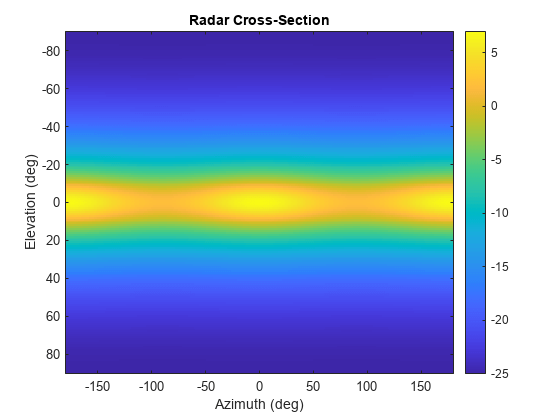
创建一个数组RCS。指定范围的方位角和高度角的定义RCS。然后,使用一个分析模型来计算椭球的雷达横截面。创建一个图像的RCS。
阿兹= [180:1:180];el = [90:1:90];rcs = rcs_ellipsoid (a, b, c, az, el);rcsdb = 10 * log10 (rcs);显示亮度图像(az, el, rcsdb)标题(雷达横截面的)包含(的方位(度))ylabel (的海拔(度))colorbar
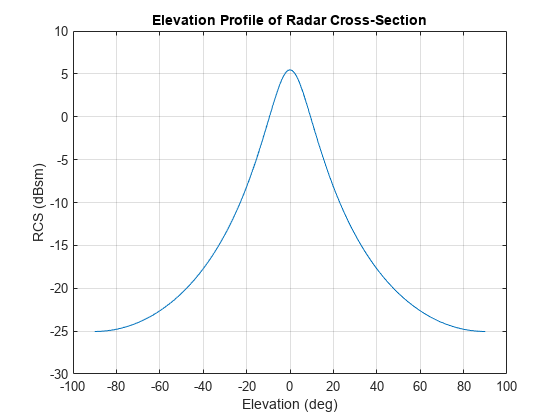
创建一个rcsSignature对象和情节海拔降低
方位。
rcssig = rcsSignature (“模式”rcsdb,“方位”阿兹,“高度”埃尔,“频率”300年[300 e6 e6]);rcsdb1 =价值(el rcssig, 30日,300 e6);情节(el rcsdb1)网格标题(“雷达横截面高程剖面”)包含(的海拔(度))ylabel (“RCS (dBsm)”)
函数rcs = rcs_ellipsoid (a, b, c, az, el) sinaz =信德(az);cosaz = cosd (az);sintheta =信德(90 - el);costheta = cosd (90 - el);分母项= (^ 2 * (sintheta”。^ 2) * cosaz。^ 2 + b ^ 2 * (sintheta”。^ 2) * sinaz。^ 2 + c ^ 2 * (costheta。^ 2) *的(大小(cosaz))) ^ 2;rcs =(π* ^ 2 * b c ^ ^ 2 * 2) /分母项;结束
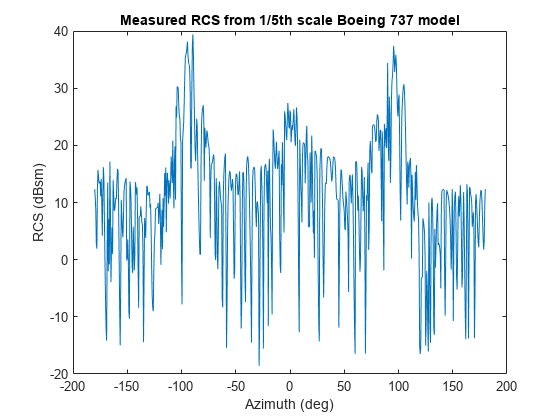
Swerling 1目标的RCS分布
进口的雷达截面(RCS)测量1/5th波音737。RCS数据加载到一个rcsSignature对象。假设RCS遵循Swerling 1分布。
负载(“RCSSignatureExampleData.mat”,“boeing737”);rcs = rcsSignature (“模式”boeing737.RCSdBsm,…“方位”boeing737.Azimuth,“高度”boeing737.Elevation,…“频率”boeing737.Frequency,“FluctuationModel”,“Swerling1”);
设置随机数生成器的种子的再现性的例子。
rng (3231)
情节样本RCS和方位角。
情节(rcs.Azimuth rcs.Pattern)包含(的方位(度));ylabel (“RCS (dBsm)”)标题(“从规模1/5th测量RCS波音737模式”)
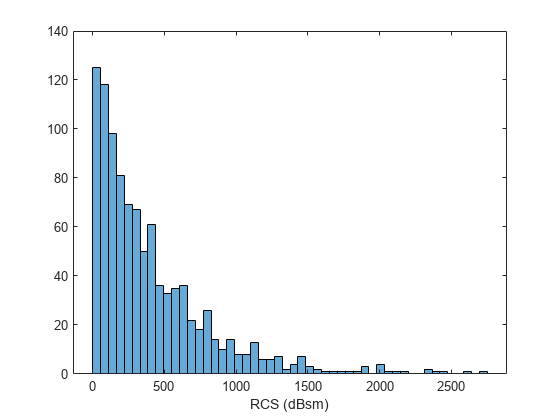
建构一动态RCS直方图和显示中值。
N = 1000;val = 0 (1, N);为k = 1: N[瓦尔(k), expval] =价值(rcs 5 0800 .0e6);结束
转换为电力的单位。
意思是(db2pow (val))
ans = 406.9799
直方图(db2pow (val), 50)包含(“RCS (dBsm)”)
引用
理查兹[1],马克。雷达信号处理的基础。纽约麦格劳-希尔,2005年。
扩展功能
版本历史
介绍了R2018b