无刷直流电动机霍尔传感器序列校准
本例计算了开环控制中转子零点位置的霍尔传感器序列。该工作流程可帮助您使用六步换向来旋转电机,而无需标记霍尔传感器或导出开关序列。运行此示例并获得霍尔序列,并将该霍尔序列与六步换向块在闭环中运行电机,如所述基于传感器反馈的无刷直流电动机六步换相的例子。
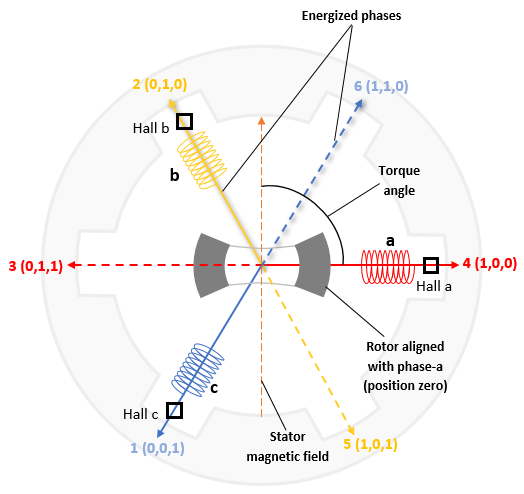
霍尔效应传感器根据施加的磁场强度改变其输出电压。根据标准配置,无刷直流(BLDC)由三个霍尔传感器组成,它们的电间距为120度。具有标准霍尔位置的BLDC电机(其中传感器电气位置相距120度)可以提供六种有效的二进制状态组合:例如,001,010,011,100,101和110。传感器提供了转子的角位置,在60度的倍数,控制器使用它来确定转子所在的60度扇区。
目标型号以低速(10转/分)开环运行电机,并对电机进行V/f控制。在这个速度下,d转子的-轴与定子的旋转磁场紧密对齐。一旦得到了关于转子零点的霍尔序列,就使用与的霍尔序列六步换向块。并使用在本例中得到的相同的霍尔顺序(来推导霍尔序列)基于传感器反馈的无刷直流电动机六步换相电机在闭环控制下运行的实例。
当转子到达开环位置零点时,它与定子的相位a轴对准。在此位置(对应霍尔态),六步换相算法为定子绕组的下两相通电,使转子始终保持90度的转矩角(转子d轴与定子磁场的夹角),偏差30度。指六步换向块和使用从该工作流中获得的霍尔序列。
霍尔序列校准算法驱动电机在一个完整的机械旋转和计算霍尔传感器序列相对于转子的位置零开环控制。
注意:此示例适用于所有电机相位或霍尔传感器连接。
注意:对于使用霍尔传感器的六步换向的示例,请在中更新计算的霍尔序列值bldc.hallsequence链接到示例的模型初始化脚本中的变量。有关说明,请参见估计控制增益并使用效用函数.
模型
该示例包括以下模型:
您只能将这些模型用于代码生成。要打开Simulin金宝appk®模型,还可以在MATLAB®命令提示符下使用open_system命令。以F28379D控制器为例:
open_system (“mcb_hall_calibration_f28379d.slx”);

有关支持的硬件配置的详细信息,请参见“金宝app生成代码并将模型部署到目标硬件”部分中的“所需硬件”。
需要MathWorks®产品下载188bet金宝搏
电机控制块集™
嵌入式编码器®
C2000™微控制器模块
定点设计器™(仅用于优化代码生成)
生成代码并将模型部署到目标硬件
本节向您展示如何通过使用开环控制来生成代码和运行电机。
本例使用一个主机和一个目标模型。主机模型是控制器硬件板的用户界面。您可以在主机计算机上运行主机模型。使用该主机型号的前提是将目标型号部署到控制器硬件板上。
主机模型使用串行通信命令目标模型,并使用V/f控制以开环配置运行电机。主机模型显示计算出的霍尔传感器序列。
所需的硬件
该示例支持这些硬件配置。金宝app还可以使用目标模型名称从MATLAB®命令提示符打开相应硬件配置的模型。
LAUNCHXL-F28069M控制器+ BOOSTXL-DRV8305变频器:mcb_hall_calibration_f28069mLaunchPad
LAUNCHXL-F28379D控制器+ BOOSTXL-DRV8305变频器:mcb_hall_calibration_f28379d
有关与这些硬件配置相关的连接,请参见LAUNCHXL-F28069M和LAUNCHXL-F28379D配置.
在目标硬件上生成代码和运行模型
1.完成硬件连接。
2.打开要使用的硬件配置的目标模型。如果要更改目标型号的默认硬件配置设置,请参见型号配置参数.
3.中更新这些电机参数配置目标模型的面板。
极对数
脉宽调制频率[Hz]
控制算法的数据类型
电机基本转速
Vd单位电压参考值
4.将示例程序加载到LAUNCHXL-F28379D的CPU2中。例如,您可以使用GPIO31 (c28379D_cpu2_blink.slx)操作CPU2蓝色LED的程序,并确保CPU2不会被错误地配置为使用用于CPU1的单板外围设备。
5.点击构建、部署和启动在硬件选项卡将目标模型部署到硬件。
6.单击主机模式在目标模型中使用超链接打开关联的主机模型。您还可以使用open_system命令打开主机模型。对F28379D控制器使用此命令:
open_system (“mcb_hall_calibration_host_f28379d.slx”);

主机与目标机型的串口通信请参见Host-Target沟通.
您可以使用主机模型中的Scope来监视开环转子位置和霍尔序列值。
7.在主机模型中,打开“主机串行设置”、“主机串行接收”和“主机串行传输”块,并选择a港口.
8.点击运行在模拟tab运行主机模型并开始霍尔序列校准,用于六步换向控制。电机运行和校准开始时,您开始模拟。校准过程完成后,仿真结束,电机自动停止。
注意:如果电机没有启动或旋转平稳,则增加值Vd参考单位电压字段(最大值为1)在配置面板。但是,如果电机产生大电流,则降低此值。
作为一种惯例,六步换向控制使用的旋转方向是相同的旋转方向使用霍尔序列校准。为了改变正向约定,将电机相线互换,再次进行霍尔序列校准,然后采用六步换向控制使电机运行。

9.查看主机型号上的这些led,了解校准过程的状态:
的正在校正当电机开始运行时,LED变成橙色。注意转子位置和Scope中霍尔序列值的变化(位置信号表示振幅在0到1之间的斜坡信号),校准过程完成后,该LED变为灰色。
的校准完成当校准过程完成时,指示灯变为绿色。然后校准输出字段显示计算出的霍尔序列值。
请注意:本例不支持模拟。金宝app
若要在紧急情况下立即停止电机,请单击电机紧急停机按钮。
您也可以从以下列表中选择一个网站: