文件帮助中心文件
计算霍尔传感器,正交编码器传感器和ADC的霍尔序列和偏移,以准确计算位置和电流反馈值。
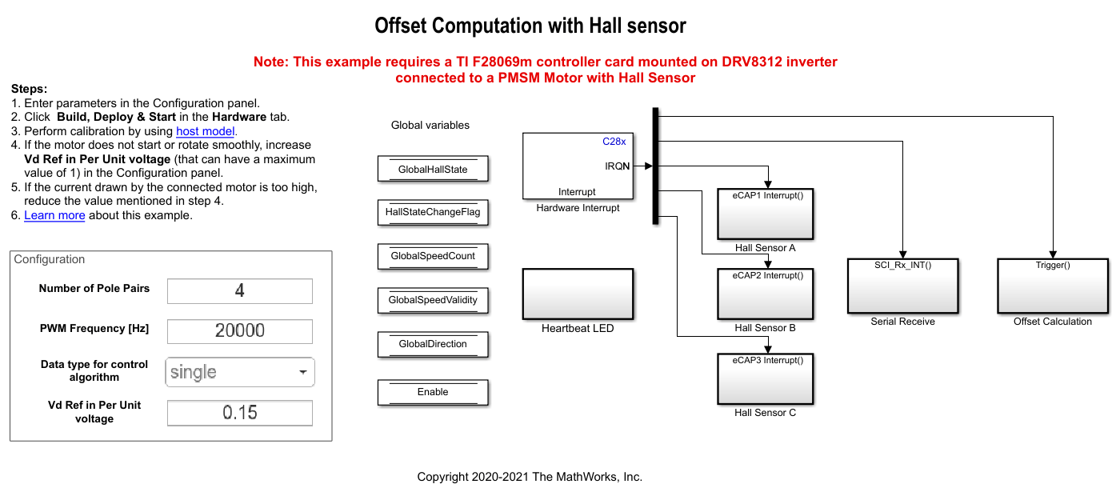
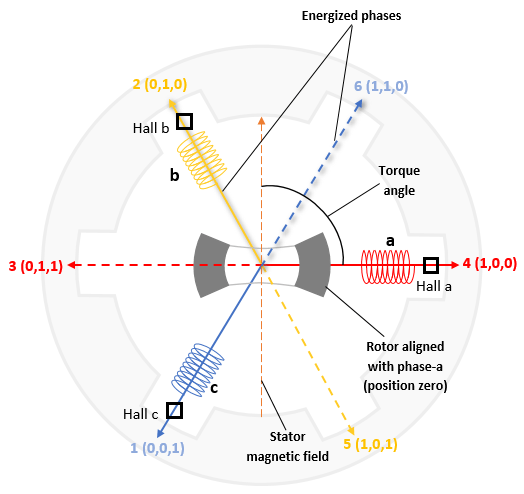
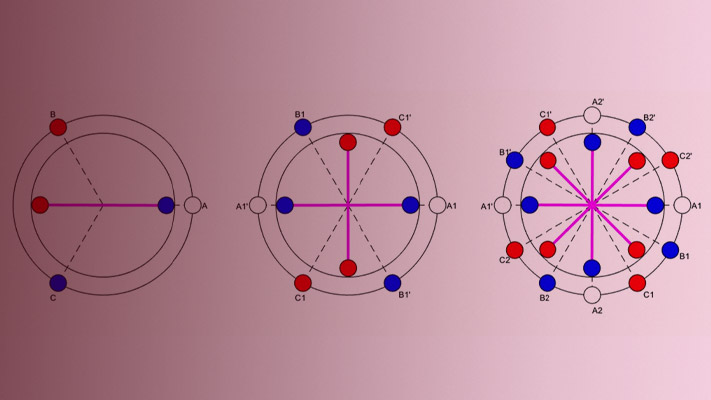
计算转子直接轴之间的偏移量(D.轴)和霍尔传感器检测的位置。面向领域的控制(FOC)算法需要该位置偏移,以正确运行永磁同步电机(PMSM)。要计算偏移量,目标模型在开环条件下运行电机。该模型使用常数(沿着定子的电压D.- 轴)和零(沿着定子的电压问:-axis)通过使用位置或斜坡发生器运行电机(以低恒定速度)。当位置或斜坡值达到零时,相应的转子位置是霍尔传感器的偏移值。
D.
问:
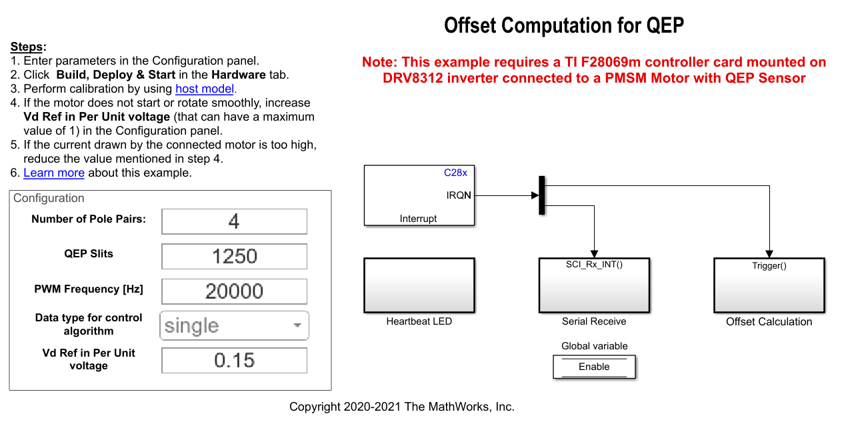
计算偏移量D.- 转子和编码器索引脉冲位置的轴,如正常编码器传感器检测到。控制算法(可用于面向现场的控制和参数估计示例)使用该偏移值来计算准确且精确的位置D.转子的轴。控制器需要该位置在转子通量参考帧(D-Q参考帧)中正确地实现面向现场的控制(FOC),因此,正确运行永磁同步电机(PMSM)。
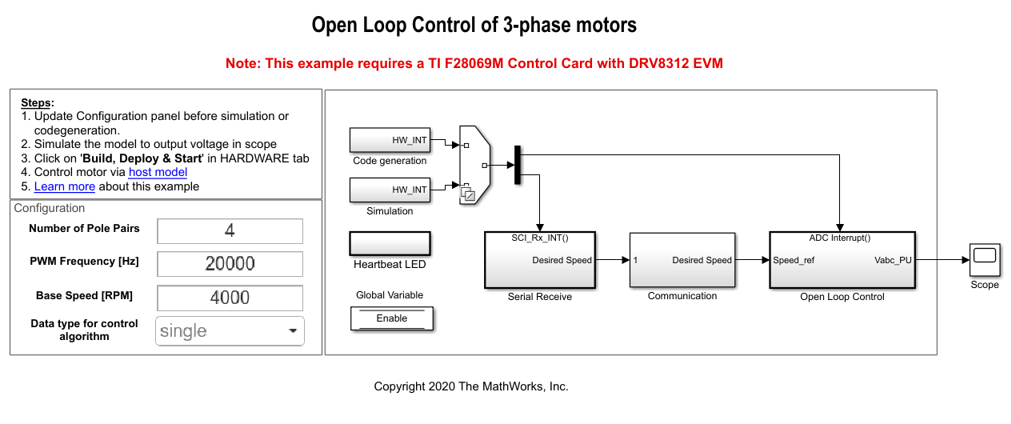
使用开环控制(也称为标量控制或伏特/ Hz控制)来运行电机。该技术变化了定子电压和频率,以控制转子速度而不使用电动机的任何反馈。您可以使用此技术来检查硬件连接的完整性。开环控制的恒定速度应用使用固定频率电机电源。开环控制的可调速度应用需要可变频率电源来控制转子速度。为了确保恒定的定子磁通量,保持与其频率成比例的电源电压幅度。
相对于在开环控制中的转子位置零计算霍尔传感器序列。
您单击了与此MATLAB命令对应的链接:
在MATLAB命令窗口中输入它来运行命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站,以便在可用的地方进行翻译的内容,并查看本地活动和优惠。根据您的位置,我们建议您选择:。
您还可以从以下列表中选择一个网站:
选择中国网站(以中文或英文)以获取最佳网站性能。其他MathWorks国家网站未优化您的位置。
联系您当地的办公室