主要内容
使用剩余滤波检测传感器读数中的噪声
此示例显示了如何使用残留对象功能和剩余滤波检测新的传感器测量可能不与电流滤波器状态一致。
负载轨迹和传感器数据
加载mat文件loggedDataWithutiPath.mat.。此文件包含模拟IMU和GPS数据以及圆形轨迹的地面真理位置和方向。GPS数据由于轨迹的一个部分中的多径错误而包含错误。通过向GPS数据添加白噪声来模拟城市峡谷的效果来建模这些错误。
加载('loggeddatawithmulipath.mat'那......'imufs'那'Accel'那'陀螺'那......%imu读数'GPSFS'那'lla'那'gpsvel'那......%GPS读数'trueposition'那'triace主管'那......%地面真理姿势'localorigin'那'InitialState'那'multipathangles')每个GPS样本的IMU样本数量。imusamplespergps =(imufs / gpsfs);对应于多径错误的名字和最后一个索引。multipathindices = [1850 2020];
融合过滤器
使用介绍两个姿势估算过滤器insfilternonholoromic.目的。使用一个过滤器处理所有传感器读数。使用其他过滤器仅处理不考虑异常值的传感器读数。
%创建过滤器。%使用此过滤器仅处理未检测到的传感器读数%异常值。gndfusionwithdetection = insfilternonholoromic('参考范围'那'enu'那......'imusamplerate',imufs,......'参考',局部素,......'decimationfactor',2);%使用此过滤器来处理所有传感器读数,无论是或%不是他们是异常值。GNDFusionNodetection = InsfilternOnHoloric('参考范围'那'enu'那......'imusamplerate',imufs,......'参考',局部素,......'decimationfactor',2);%GPS测量噪声。rvel = 0.01;RPOS = 1;该滤波器的地面车辆的动态模型假定存在百分比在运动期间没有侧滑或滑动。这意味着速度是%约束仅对前体轴。另外两个速度轴用零测量校正%读数被加权%| ZerovelocityConstraintNoise |范围。gndfusionwithdetection.zerovelocityConstraintNoise = 1E-2;gndfusionnodetection.zerovelocityConstraintNoise = 1E-2;%流程噪音。gndfusionwithdetection.gyroscopenoise = 4e-6;gndfusionwithdetection.gyroscopdbiasnoise = 4e-14;gndfusionwithdetection.acceleromernoise = 4.8e-2;gndfusionwithdetection.accelerometerbiasnoise = 4e-14;gndfusionnodetection.gyroscopenoise = 4e-6;gndfusionnodetection.gyroscopdbiasnoise = 4e-14;gndfusionnodetection.acceleromernoise = 4.8e-2;gndfusionnodetection.accelerometerbiasnoise = 4e-14;%初始滤波器状态。gndfusionwithdetection.state = initialstate;gndfusionnodetection.state = initialstate;%初始错误协方差。gndfusionwithdetection.statecovariance = 1e-9 *那些(16);gndfusionnodetection.statecovariance = 1e-9 *那些(16);
初始化范围
这HelperpositeViewer.范围允许3-D可视化比较过滤估计和地面真理。使用多个范围可以减慢模拟。要禁用范围,请将相应的逻辑变量设置为错误的。
movingsview = true;%打开3D姿势查看器如果MOVERMOSEVIEW [查看器WithDetection,Viewernodetection,AnnoHandle]......= HelperCreatePoseViewers(InitialState,MultiPathangles);结尾
仿真环路
主要模拟环是一个为了循环与嵌套为了环形。第一个循环执行GPSFS.,这是GPS测量率。嵌套循环执行IMUFS.,这是IMU采样率。每个范围都以IMU采样率更新。
numsamples = numel(tryerverientation);numgpssamples = numsamples / imusamplespergps;最终度量计算的%日志数据。estpositionNocheck =零(Numsamples,3);estorientationNocheck =四星。会(Numsamples,1);estposition = zeros(numsamples,3);estorientation = Quaternion.zeros(Numsamples,1);异常值残差的%阈值。ResealThreshold = 6;Idx = 0;为了SampleIdx = 1:NumGPSSamplesIMU更新频率下%预测循环。为了i = 1:imusamplespergps idx = idx + 1;%使用预测方法来估计基于滤波器状态的方法AcceldAta和Gyrodata阵列的百分比。预测(GNDFusionWithDetection,Accel(IDX,:),Gyro(IDX,:));预测(GNDFusionNodetection,Accel(IDX,:),陀螺(IDX,:));%记录估计的方向和位置。[estpositionNocheck(IDX,:),estorientationNocheck(IDX,:)]......=姿势(GNDFusionWithDetection);[estposition(idx,:),estorientation(idx,:)]......=姿势(GNDFusionNodetection);%更新姿势查看器。如果UpployView ViewerWithDetection(estpositionNocheck(IDX,:),......estorientationNocheck(IDX,:),......trueposition(idx,:),triace主管(idx,:));视网膜级(estposition(idx,:),......estorientation(IDX,:),Trueposition(IDX,:),......Triace主顾(IDX,:));结尾结尾%该代码的下一部分以GPS采样率运行。%基于GPS数据更新过滤器状态。Fusegps(GNDFusionWithDetection,LLA(SampleIdX,:),RPO,......gpsvel(sampleidx,:),rvel);%检查当前GPS读数的标准化残余。如果是%值太大,它被认为是一个异常值并被忽视。[Res,Rescov] = ResidualGPS(GNDFusionNodetection,LLA(SampleIdx,:),......RPOS,GPSVel(SampleIdx,:),rvel);Incormalizedres = Res(1:3)./ SQRT(DIAG(RESCOV(1:3,1:3))。');如果(所有(ABS(INSORMIZEDRES)<= REDILUNTHESHOLD))%基于GPS数据更新过滤器状态。Fusegps(GNDFusionNodetection,LLA(SampleIdX,:),RPO,......gpsvel(sampleidx,:),rvel);如果UppoimopeView集(AnnoHandle,'细绳'那'异常值状态:无'那......'Edgecolor'那'K');结尾别的如果UppoimopeView集(AnnoHandle,'细绳'那'异常值状态:检测到'那......'Edgecolor'那'r');结尾结尾结尾


错误度量计算
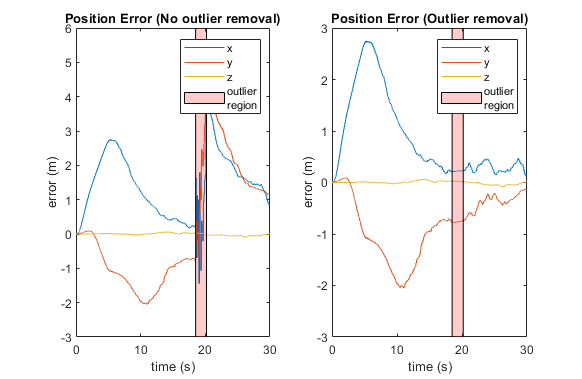
计算滤波器估计的位置误差。滤波器中的位置误差增加,不会检查GPS测量中的任何异常值。
%计算位置错误。posdnocheck = estpositionnocheck - trueposition;posd = estthosition - trueentosition;%绘图结果。t =(0:大小(POSD,1)-1)。'./ imufs;数字('单位'那'标准化'那'位置',[0.2615 0.2833 0.4552 0.3700])子图(1,2,1)图(t,posdnocheck)ax = gca;ylims = get(ax,'ylim');抓住上mi =多田径;填充([t(mi(1)),t(mi(1)),t(mi(2)),t(mi(2))],[7 -5 -5 7],......[1 0 0],'Facealpha',0.2);套(斧头,'ylim',ylims);标题('位置错误(删除异常值)')xlabel('时间'')ylabel('错误(m)') 传奇('X'那'是'那'z',Sprintf('异常\ nregion'))子图(1,2,2)绘图(t,posd)ax = gca;ylims = get(ax,'ylim');抓住上mi =多田径;填充([t(mi(1)),t(mi(1)),t(mi(2)),t(mi(2))],[7 -5 -5 7],......[1 0 0],'Facealpha',0.2);套(斧头,'ylim',ylims);标题('位置错误(异常删除)')xlabel('时间'')ylabel('错误(m)') 传奇('X'那'是'那'z',Sprintf('异常\ nregion')))
结论
这残留在使用它们以更新滤波器状态之前,可以使用对象功能来检测传感器测量中的潜在异常值insfilternonholoromic.目的。其他姿势估计滤波器对象,如,insfiltermarg.那insfilterasync., 和insfiltererrorstate.还具有类似的对象功能来计算传感器测量残差。
您还可以从以下列表中选择一个网站: