主要内容
传感器模型
IMU, GPS和距离传感器的校准和模拟
为加速度计、磁力计、陀螺仪、高度计、GPS、IMU和测距传感器进行传感器建模和仿真。分析传感器读数、传感器噪声、环境条件等配置参数。生成轨迹以模拟这些传感器在世界中旅行,并校准您的传感器的性能。
功能
对象
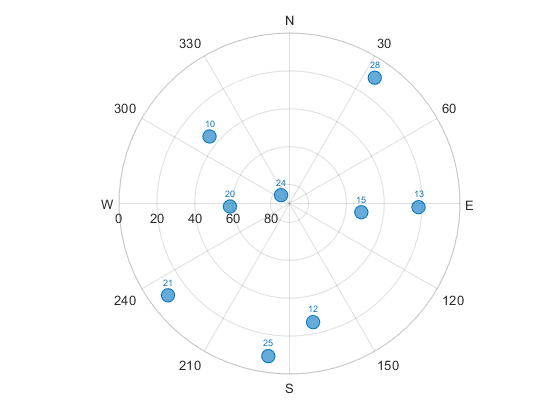
gnssSensor |
模拟GNSS产生位置和速度读数 |
altimeterSensor |
高度计仿真模型 |
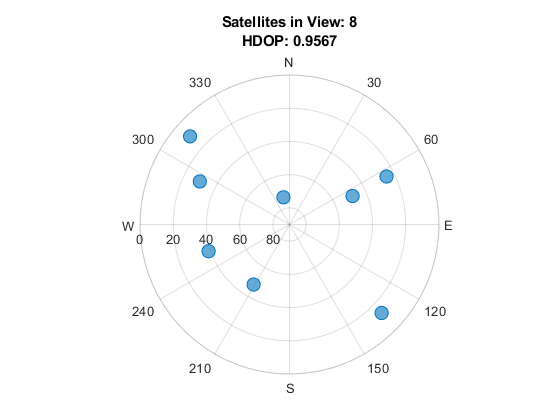
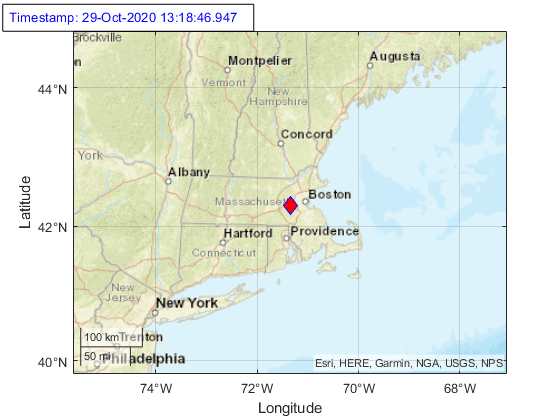
gpsSensor |
GPS接收机仿真模型 |
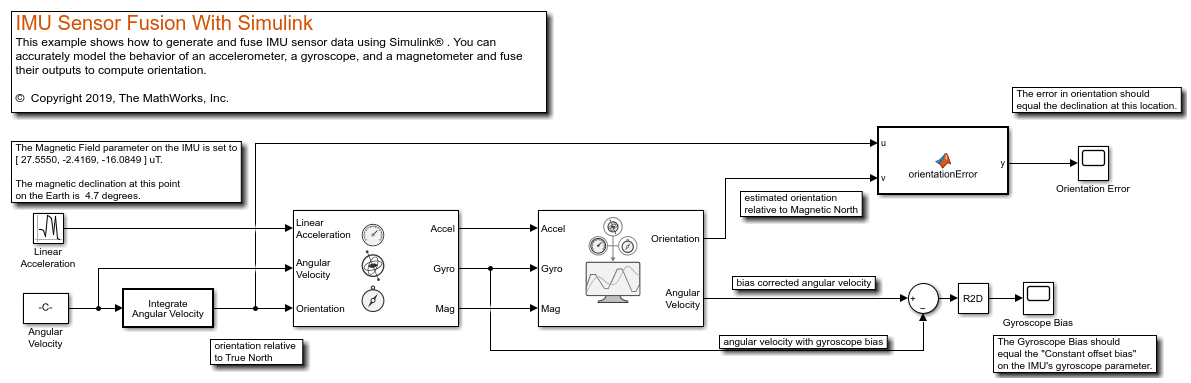
imuSensor |
IMU仿真模型 |
insSensor |
惯性导航系统和GNSS/GPS仿真模型 |
rangeSensor |
模拟距离方位传感器读数 |
wheelEncoderUnicycle |
为独轮车模拟车轮编码器传感器读数 |
wheelEncoderBicycle |
模拟自行车车轮编码器传感器读数 |
wheelEncoderDifferentialDrive |
模拟车轮编码器传感器读数的差动驱动车辆 |
wheelEncoderAckermann |
为阿克曼车辆模拟车轮编码器传感器读数 |
kinematicTrajectory |
Rate-driven轨迹发生器 |
timescope |
显示时域信号 |
waypointTrajectory |
路径轨迹发生器 |
nmeaParser |
从GNSS接收端发送的标准NMEA语句中解析数据 |
gpsdev |
连接到一个与主机相连的GPS接收器 |
主题
惯性传感器与GPS的模型组合
本实例介绍了如何利用Allan方差来确定MEMS陀螺仪的噪声参数。
探讨车轮编码器的各种误差来源及其对车轮测程估计的影响。
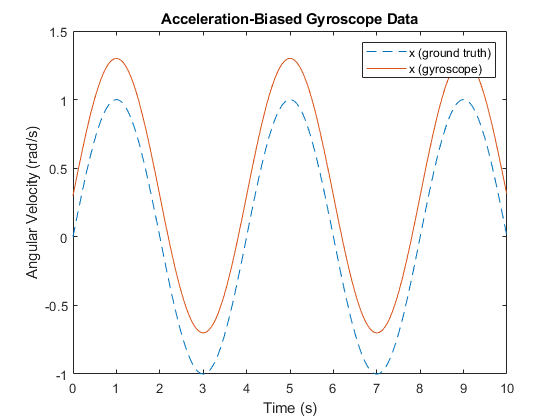
这个例子展示了如何消除陀螺偏压从一个IMU使用imufilter。
定制timescope属性和使用测量工具。
使用自动驾驶工具箱™中的驾驶场景生成工具,从IMU、GPS和车轮编码器生成合成传感器数据。
特色的例子
你也可以从以下列表中选择一个网站: