主要内容
生成偏心的IMU读数
该示例示出了如何从安装在地面车辆上的传感器产生惯性测量单元(IMU)读数。根据传感器的位置,IMU加速度不同。
创建轨迹
指定车辆的航路点轨迹并使用车辆姿势计算lookupPose.
%采样率。Fs = 100;航路点和到达时间。路径点= [1 1 1;3 1 1;3 0 0;0 0 0];t = [1;10;20;30);创建轨迹和计算姿势。traj = waypointTrajectory(路径点,t,“SampleRate”Fs);[posVeh, orientVeh, velVeh, accVeh, angvelVeh] = lookupPose(traj,...t (1): 1 / Fs: t ());
创建传感器和定义偏移量
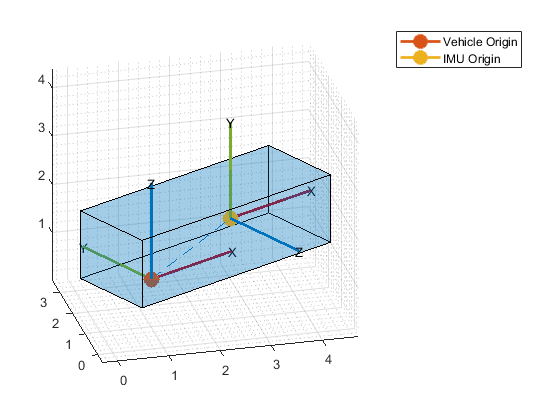
创建两个9轴imuSensor由加速度计、陀螺仪和磁强计传感器组成的物体。一个imuSensor对象生成安装在车辆原点的IMU的读数,另一个生成安装在驾驶员座位上的IMU的读数。接下来,指定车辆原点和安装在驾驶员座位上的IMU之间的偏移量。调用helperPlotIMU可视化传感器的位置。
% IMU在车辆起源。imu = imuSensor (“Accel-Gyro-Mag”,“SampleRate”Fs);IMU坐在驾驶座上。mountedIMU = imuSensor (“Accel-Gyro-Mag”,“SampleRate”Fs);车辆和安装的IMU的位置和方向偏移。posVeh2IMU = [2.4 0.5 0.4];orientVeh2IMU =四元数([0 0 90],“eulerd”,“ZYX股票”,“框架”);%可视化。helperPlotIMU(posVeh(1,:), orientVeh(1,:), posVeh2IMU, orientVeh2IMU);
利用车辆轨迹计算IMU轨迹
计算使用驾驶员座椅安装在驾驶员座位上的地面真理轨迹转型函数。该函数利用位置和姿态偏移量以及车辆轨迹来计算IMU轨迹。
[Posimu,Orientimu,Velimu,Accimu,Angvelimu] = TransformMotion(...posVeh2IMU orientVeh2IMU,...posVeh, orientVeh, velVeh, accVeh, angvelVeh);
生成传感器读数
生成安装在车辆原点的IMU和安装在驾驶员座位的IMU的IMU读数。
% IMU在车辆起源。[accel, gyro, mag] = imu(accVeh, angvelVeh, orientVeh);IMU坐在驾驶座上。[accelMounted, gyroMounted, magMounted] = mountedIMU(...accIMU、angvelIMU orientIMU);
比较加速度计读数
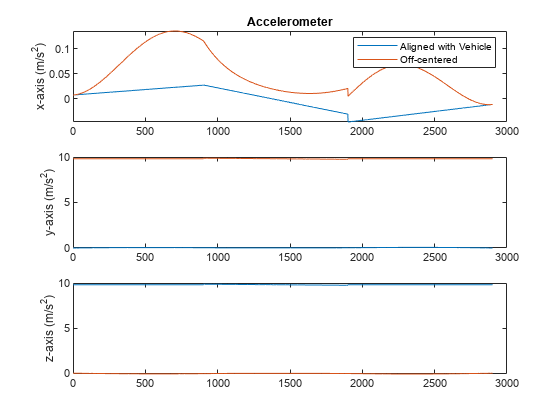
比较两个imu的加速度计读数。请注意,x- 由于偏离中心位置,轴心加速度不同。
图(“名字”,'加速度计比较') subplot(3,1,1) plot([accel(:,1), accelMounted(:,1)]) legend(与车辆的,'偏心')标题('加速度计')ylabel(“轴(m / s ^ 2)”)子图(3,1,2)绘图([Accel(:,2),Accelmounted(:,2)] Ylabel('y轴(m / s ^ 2)')子图(3,1,3)绘图([Accel(:,3),Accelmounted(:,3)])Ylabel(“z轴(m / s ^ 2)”)
比较陀螺仪数据
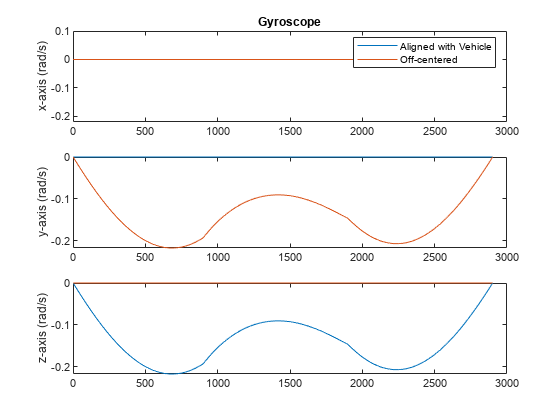
比较两个imu的陀螺仪读数。
图(“名字”,'陀螺比较')次要情节(3、1、1)的阴谋([陀螺(:1),gyroMounted (: 1)]) ylim([-0.22 - 0.1])传说(与车辆的,'偏心')标题(“陀螺”)ylabel('x轴(rad / s)'次要情节(3、1、2)情节([陀螺(:,2),gyroMounted (:, 2)]) ylabel ('y轴(rad / s)')子图(3,1,3)绘图([陀螺(:,3),gyromounted(:,3)] ylabel('z轴(rad / s)')
比较磁强计读数
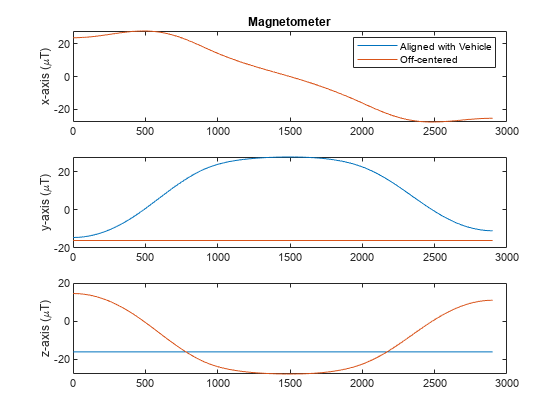
比较两个imu的磁强计读数。
图(“名字”,“磁强计比较”)次要情节(3、1、1)的阴谋([杂志(:1),magMounted(: 1)])传说(与车辆的,'偏心')标题('磁力计')ylabel('x轴(\ mut)'次要情节(3、1、2)情节([杂志(:,2),magMounted (:, 2)]) ylabel (“轴(\狗)”次要情节(3,1,3)情节([杂志(:,3),magMounted (:, 3)]) ylabel (“z轴(\狗)”)
您还可以从以下列表中选择一个网站: