主要内容
开始吧导航工具箱
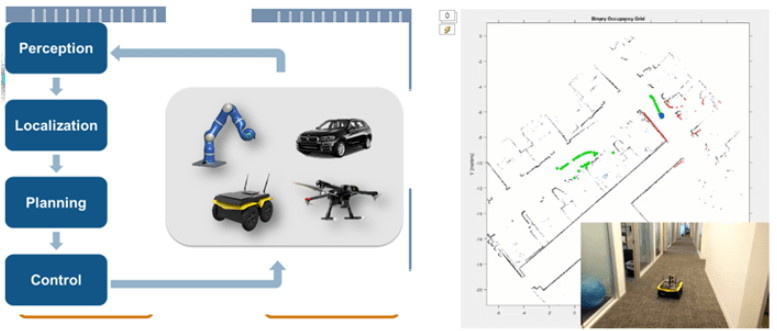
自主导航设计,模拟和部署算法
导航工具箱™提供运动规划,同时定位和映射(SLAM)和惯性导航的算法和分析工具。工具箱包括可自定义的搜索和基于采样的路径规划仪,以及用于验证和比较路径的指标。您可以创建2D和3D地图表示,使用SLAM算法生成地图,并使用SLAM Map Builder应用程序交互式可视化和调试映射生成。该工具箱提供了传感器模型和用于本地化的算法。您可以模拟和可视化IMU,GPS和轮式编码器传感器数据,以及用于多传感器姿态估计的调谐融合滤波器。
提供了用于自动驾驶,机器人和消费电子应用的参考示例。您可以通过将它们直接部署到硬件来测试导航算法(使用马铃薯®编码器™或者金宝app®编码器)。
教程
- 旋转,方向和四元数
此示例评论了三维旋转中的概念以及数量如何用于描述方向和旋转。
- 模拟IMU测量的简介
此示例显示如何使用该示例模拟惯性测量单元(IMU)测量
imusvesor.(传感器融合和跟踪工具箱)系统对象。 - 估算地面车辆的位置和定向
该示例示出了如何通过从惯性测量单元(IMU)和全球定位系统(GPS)接收器融合数据来估计地面车辆的位置和方向。
- 用扫描匹配估算机器人姿势
此示例演示了如何使用正常分布变换(NDT)算法[1]匹配两个激光扫描。
- 使用RRT计划移动机器人路径
此示例显示如何使用快速探索随机树(RRT)算法通过已知地图规划车辆的路径。
- 使用LIDAR扫描实现同时定位和映射(SLAM)
此示例演示了如何使用姿势图优化在收集的LIDAR扫描上实现同时定位和映射(SLAM)算法。
- 使用3-D LIDAR点云执行SLAM
此示例演示了如何实现同时定位和映射使用点云处理算法收集的3-D LIDAR传感器数据的(SLAM)算法和姿势图优化。
您还可以从以下列表中选择一个网站: