insSensor
惯性导航系统和GNSS/GPS仿真模型
描述
的insSensor系统对象™模拟一种设备,该设备融合来自惯性导航系统(INS)和全球导航卫星系统(GNSS)的测量数据,如GPS,并输出融合的测量数据。
要输出融合的INS和GNSS测量值:
创建
insSensor对象并设置其属性。使用参数调用对象,就像调用函数一样。
要了解更多关于System对象如何工作的信息,请参见什么是系统对象?
创造
属性
用法
描述
输入参数
输出参数
对象的功能
要使用对象函数,请指定System对象作为第一个输入参数。例如,释放名为system的对象的系统资源obj,使用下面的语法:
释放(obj)
例子
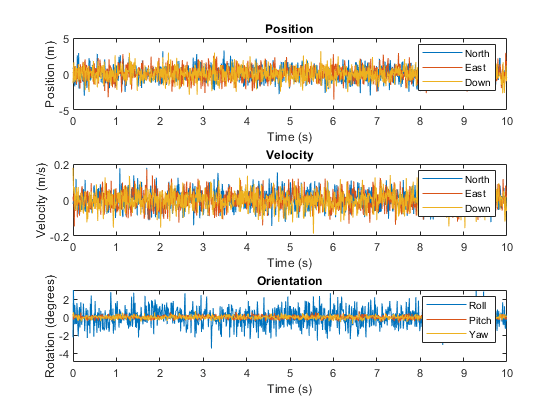
从静止输入生成INS测量值
创建一个运动结构,定义本地东北向下(NED)原点处的静止位置。因为平台是静止的,所以只需要定义一个样本。假设地面真实运动以100 Hz采样率采样10秒。创建默认值insSensor系统对象™。对象的预分配变量以保存输出insSensor对象
Fs=100;duration=10;numSamples=Fs*duration;motion=struct(...“位置”, 0(1、3)...“速度”, 0(1、3)...“方向”,一(1,1,“四元数”));INS = insSensor;positionMeasurements = 0 (numSamples, 3);velocityMeasurements = 0 (numSamples, 3);orientationMeasurements = 0 (numSamples 1“四元数”);
在循环中,调用INS使用静止运动结构返回本地NED坐标系中的位置、速度和方向测量值。记录位置、速度和方向测量值。
为i = 1:numSamples measurements = INS(motion);: positionMeasurements(我)= measurements.Position;: velocityMeasurements(我)= measurements.Velocity;orientationMeasurements (i) = measurements.Orientation;结束
转换方向从四元数到欧拉角的可视化目的。绘制随时间变化的位置、速度和方向测量值。
orientationMeasurements = eulerd (orientationMeasurements,“ZYX股票”,“帧”);t = (0: (numSamples-1)) / Fs;次要情节(1,1)情节(t, positionMeasurements)标题(“位置”)xlabel(‘时间’)伊拉贝尔(“位置(m)”)传说(“北”,“东方”,“向下”)子图(3,1,2)plot(t,velocityMeasurements) title(“速度”)xlabel(‘时间’)伊拉贝尔(“速度(m/s)”)传说(“北”,“东方”,“向下”子图(3,1,3)plot(t,orientationMeasurements) title(“方向”)xlabel(‘时间’)伊拉贝尔(的旋转(度))传说(“滚”,“投球”,“偏航”)
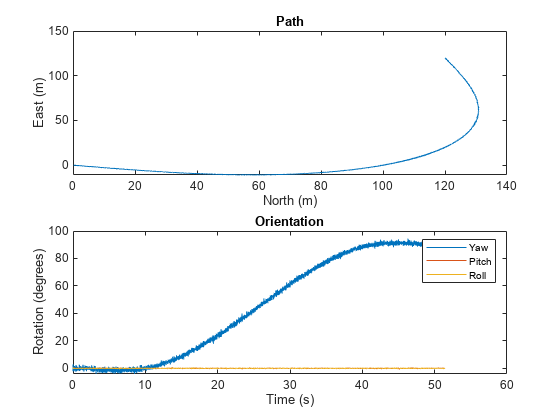
为转向平台生成INS测量
生成INS测量insSensor系统对象™。使用waypointTrajectory生成地面真理路径。
指定从传感器本体开始的地面真实方向x-轴与北对齐,端部与传感器本体对齐x-轴与东方对齐。为弧线轨迹指定路径点,并为相应的路径点指定到达时间向量。使用100hz的采样率。创建一个waypointTrajectory系统对象与路点约束,并设置SamplesPerFrame所以整个轨迹是通过一次调用输出的。
eulerAngles = [0, 0, 0;...0,0,0;...90,0,0;...90年,0,0);取向=四元数(eulerAngles,“eulerd”,“ZYX股票”,“帧”);r=20;航路点=[0,0,0;...100,0,0;...100 + r, r, 0;...100 + r, 100 + r, 0);toa =[0、10、10 +(2 *π* r / 4), 20 +(2 *π* r / 4)];Fs = 100;numSamples =地板(Fs * toa(结束));路径= waypointTrajectory (“航路点”锚点,...“到达时间”toa,...“方向”取向,...“SampleRate”,财政司司长,...“SamplesPerFrame”,numSamples);
创建一个insSensor接收INS数据的模型的系统对象。设置PositionAccuracy到0.1.
ins=ins传感器(“PositionAccuracy”, 0.1);
调用路径点轨迹对象,路径,以生成地面真实运动。呼叫INS模拟器,ins,利用地面真实运动生成INS测量。
[motion.Position,motion.Orientation,motion.Velocity]=path();insMeas=ins(motion);
转换返回的方向ins到欧拉角的角度。随着时间的推移绘制完整的路径和方向。
方向测量Euler=eulerd(在测量方向时,“ZYX股票”,“帧”);次要情节(2,1,1)情节(insMeas.Position (: 1), insMeas.Position (:, 2));标题(“路径”)xlabel("北(m)")伊拉贝尔(“东(m)”) subplot(2,1,2) t = (0:(numSamples-1)).'/Fs;情节(t, orientationMeasurementEuler (: 1),...t、 方向测量欧拉(:,2),...t, orientationMeasurementEuler (:, 3));标题(“方向”)传说(“偏航”,“投球”,“滚”)xlabel(‘时间’)伊拉贝尔(的旋转(度))
扩展功能
您还可以从以下列表中选择网站: