四元
创建一个四元数数组
描述
四元数是在三维旋转和取向中使用的四部分组成的超复数。
四元数在表单中表示 ,在那里一种,b,C,d份是实数,且i,j和k分别是基础元件,满足方程:一世2j =2= k2= IJK = -1。
四元数的集合,用表示H中,在实数四维向量空间中定义,其[R4。每个元素的H具有基于所述基础元件,I,J,和K的线性组合的唯一表示。
在3-d的所有旋转可以通过绕该轴线的旋转和角度的轴进行说明。在旋转矩阵四元数的优点在于,旋转轴和角度是容易理解。例如,考虑在一个点[R3。要旋转该点,需要定义旋转轴和旋转角度。
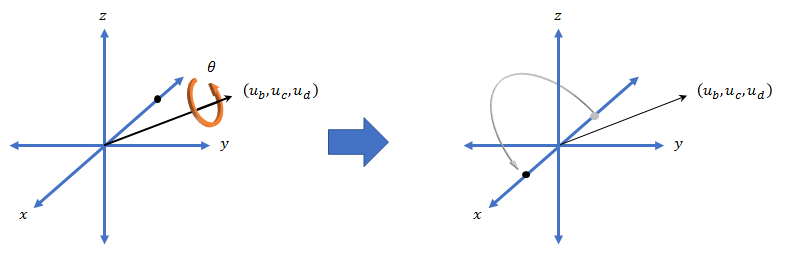
旋转的四元数表示可以被表示为 ,在那里θ为旋转角度,[üb,üC,üd是旋转轴。
创建
句法
描述
皮疹四元数=()
皮疹四元数=(A, B, C, D)一种,乙,C,d。所有输入必须具有相同的大小,相同的数据类型。
输入参数
A, B, C, D-四元数的部分
相同大小的逗号分隔的数组
四元数的一部分,指定为四个逗号分隔的标量、矩阵或相同大小的多维数组。
例:皮疹=四元数(1、2、3、4)创建一个形式为1 + 2i + 3j + 4k的四元数。
例:季铵盐=四元数([1,5],[2,6],[3,7],[4,8])创建了一个1×2四元阵列,其中quat(1,1) = 1 + 2i + 3j + 4k和季铵化合物(1,2)= 5 + 6I + 7J + 8k的
数据类型:单|双
矩阵-四元数矩阵的部件
ñ-by-4矩阵
的四元数份矩阵,指定为ñ4矩阵。每一行表示一个单独的四元数。每一列表示一个单独的四元数部分。
例:季铵盐=四元数(RAND(10,4))创建了一个10×1四元阵列。
数据类型:单|双
房车-旋转向量的矩阵
ñ-by-3矩阵
旋转向量的矩阵,指定为ñ3矩阵。每行房车表示旋转矢量的[X Y Z]的元素。旋转向量是表示旋转轴的单位矢量缩放通过旋转弧度或度数的角度。
要使用此语法,请将第一个参数指定为旋转向量的矩阵,将第二个参数指定为“rotvec”或“rotvecd”。
例:季铵盐=四元数(RAND(10,3), 'rotvec')创建了一个10×1四元阵列。
数据类型:单|双
RM-旋转矩阵
3乘3矩阵|3-by-3-by -ñ排列
旋转矩阵的数组,由3×3矩阵或3×3×-矩阵指定ñ阵列。该数组的每个页面代表一个单独的旋转矩阵。
例:皮疹=四元数(兰德(3),“rotmat”,“点”)
例:皮疹=四元数(兰德(3),“rotmat”,“框架”)
数据类型:单|双
PF-旋转矩阵类型
“点”|'帧'
旋转矩阵的输入时,通过指定“点”或'帧'。
例:皮疹=四元数(兰德(3),“rotmat”,“点”)
例:皮疹=四元数(兰德(3),“rotmat”,“框架”)
数据类型:烧焦|字符串
Ë-欧拉角矩阵
ñ-by-3矩阵
欧拉角矩阵,由an表示ñ3矩阵。如果使用“欧拉”语法,指定Ë在弧度。如果使用'eulerd'语法,指定Ë度。
例:皮疹四元数=(Ë“欧拉”,“YZY”,“点”)
例:皮疹四元数=(Ë, '欧拉', 'XYZ', '帧')
数据类型:单|双
RS-旋转序列
特征向量|标量字符串
旋转序列,指定为三元素字符向量:
'YZY''YXY'之一的ZYZ”“ZXZ”“新亚芯”'XZX''XYZ''YZX'“ZXY”'XZY''ZYX'“YXZ”
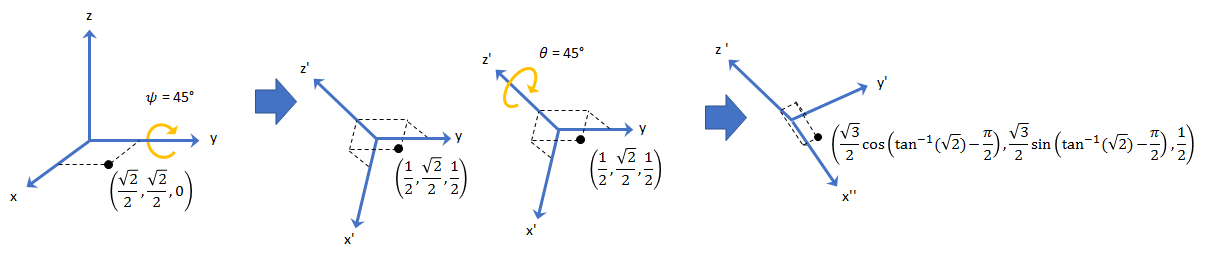
假设你想要确定一个点的新坐标,当它的坐标系使用坐标系旋转时。点在原始坐标系中定义为:
点= [SQRT(2)/ 2,SQRT(2)/ 2,0];
你想使用欧拉角表示来旋转这个点[45,45,0]。使用两个不同的旋转序列旋转点:
如果创建一个四元数旋转器和指定“ZYX”序列,该帧首先被旋转45°的周围ž轴,然后45围绕新°ÿ设在。
quatRotator =四元数([45,45,0],'eulerd','ZYX','帧');newPointCoordinate = rotateframe(quatRotator,点)
newPointCoordinate = 0.7071 -0.0000 0.7071

如果创建一个四元数旋转器和指定“YZX”序列,该帧首先被旋转45°的周围ÿ轴,然后45围绕新°ž设在。
quatRotator =四元数([45,45,0],'eulerd','YZX','帧');newPointCoordinate = rotateframe(quatRotator,点)
newPointCoordinate = 0.8536 0.1464 0.5000


数据类型:烧焦|字符串
对象函数
angvel |
从四元阵列角速度 |
classUnderlying |
四元数内零件的类别 |
紧凑 |
转换四元数组ñ-by-4矩阵 |
连词 |
四元数的复共轭 |
ctranspose“ |
四元阵列的复共轭转置 |
经销 |
以弧度表示的角距离 |
欧拉 |
将四元数转换为欧拉角(弧度) |
eulerd |
四元数转换到欧拉角(度) |
经验值 |
四元数阵列的指数 |
ldivide。\ |
元素方面的四元左师 |
日志 |
四元阵列的自然对数 |
meanrot |
四元数是指旋转 |
- - - - - - - |
四元数减法 |
mtimes, * |
四元数乘法 |
规范 |
四元数规范 |
正常化 |
四元数归一化 |
的 |
创建四元数数组,实部设置为1,虚部设置为0 |
部分 |
四元数提取零件 |
权力,。^ |
Element-wise四元数的力量 |
刺 |
四元数数组的乘积 |
randrot |
均匀分布随机旋转 |
rdivide。/ |
元素方面的四元数师权 |
rotateframe |
四元数帧旋转 |
rotatepoint |
四元数角度旋转 |
rotmat |
将四元数转换为旋转矩阵 |
rotvec |
转换到四元数旋转矢量(弧度) |
rotvecd |
将四元数转换为旋转矢量(度) |
slerp |
球面线性插值 |
次,. * |
逐元素乘法四元数 |
转置,”。 |
移调四元阵列 |
UMINUS, - |
四元元减号 |
零 |
创建四元数数组,所有部分设置为零 |
例子
扩展功能
也可以看看
介绍了在R2019b
你也可以从以下列表中选择一个网站: