主要内容
旋转点
四元数点旋转
描述
轮换案例=旋转点(Quat.那cartesianPoints的)Quat.。在旋转之前使用前季鎓的元素是标准化的。

例子
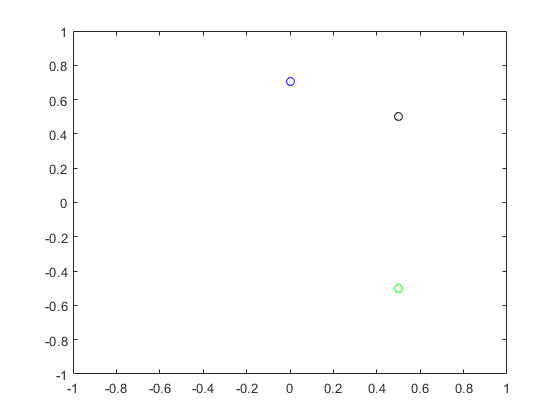
使用四元数向量旋转点
在三维空间中定义一个点。点的坐标总是按顺序指定的X那y那Z.。为了方便的可视化,定义了该点X-y飞机。
x = 0.5;y = 0.5;z = 0;绘图(x,y,“柯”)举行在轴([-1 1 -1 1])

创建一个单独的向量,指定两个单独的旋转,一个旋转点45,另一个旋转点-90度旋转Z.-轴。用旋转点执行旋转。
quat =四元音([0,0,pi / 4;......0,0,-PI / 2],'euler'那'XYZ'那'观点');RotatedPoint = RotatePoint(Quat,[x,y,z])
旋转点=2×3-0.0000 0.7071 0 0.5000 -0.5000 0
绘制旋转点。
绘图(旋转点(1,1),旋转点(1,2),“波”)绘图(旋转点(2,1),旋转点(2,2),'走'的)
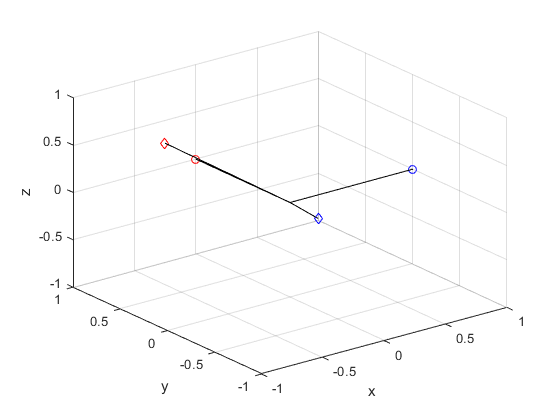
使用四元数旋转一组点
在三维空间中定义两个点。通过首先旋转旋转,定义四元度以旋转点Z.-AXIS 30度,然后关于新的y设在45度。
a = [1,0,0];b = [0,1,0];quat =四元数([30,45,0],'eulerd'那'Zyx'那'观点');
用旋转点使用四元旋转操作员旋转两个点。显示结果。
RP =旋转点(QUAT,[A; B])
RP =2×30.6124 0.5000 -0.6124 -0.3536 0.8660 0.3536
可视化原始方向和点的旋转方向。为了直观起见,从原点到每个点画线。
Plot3(a(1),a(2),a(3),“波”);抓住在网格在轴([ - 1 1 -1 1 -1 1])xlabel('X') ylabel ('是')Zlabel('z')Plot3(B(1),B(2),B(3),'ro');Plot3(RP(1,1),RP(1,2),RP(1,3),'bd')Plot3(RP(2,1),RP(2,2),RP(2,3),'rd')Plot3([0; RP(1,1)],[0; RP(1,2)],[0; RP(1,3)],'k')plot3([0; rp(2,1)],[0; rp(2,2)],[0; rp(2,3)],'k')plot3([0; a(1)],[0; a(2)],[0; a(3)],'k')plot3([0; b(1)],[0; b(2)],[0; b(3)],'k'的)
输入参数
输出参数
算法
四元数点旋转旋转指定的点R.3.根据指定的四元音:
在哪里问:是四元音,*代表接合,你是要旋转的点,指定为四元数。
为方便起见,旋转点函数需要一个点R.3.并返回一个点R.3.。给定有一个任意四元数的函数调用,问:=一种+B.我+Cj +D.K.,和任意坐标,[X那y那Z.]例如,
RereferenceSpoint =旋转点(Q,[x,y,z])
旋转点函数执行以下操作:
将点[X那y那Z.]到四元数:
正常化四元数,问::
适用旋转:
转换四元数输出,V.问:, 回到R.3.
扩展能力
介绍在R2019B.
你也可以从以下列表中选择一个网站: