IMU.GyD.F4y2Ba
IMU仿真模型GyD.F4y2Ba
- 图书馆:GyD.F4y2Ba
传感器融合和跟踪工具箱/多传感器定位/传感器型号GyD.F4y2Ba
导航工具箱/多传感器定位/传感器型号GyD.F4y2Ba
描述GyD.F4y2Ba
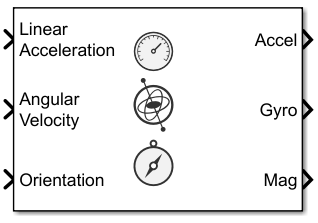
这GyD.F4y2BaIMU.GyD.F4y2Ba金宝app®GyD.F4y2Ba块模型从由加速度计,陀螺和磁力计传感器组成的惯性测量单元(IMU)接收数据。GyD.F4y2Ba
港口GyD.F4y2Ba
输入GyD.F4y2Ba
输出GyD.F4y2Ba
参数GyD.F4y2Ba
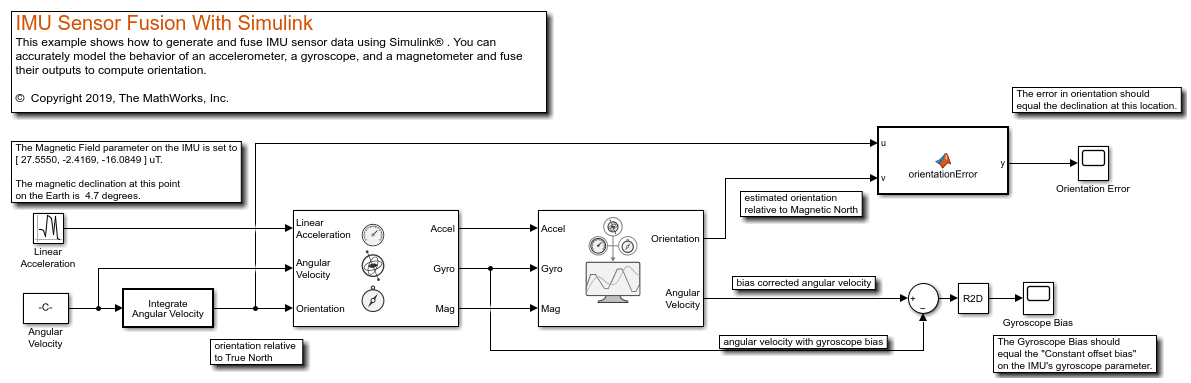
模型例子GyD.F4y2Ba
算法GyD.F4y2Ba
加速度计GyD.F4y2Ba
加速度计模型使用地面真实的方向和加速度输入和GyD.F4y2Baimusvesor.GyD.F4y2Ba和GyD.F4y2Ba加速GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba模型加速度计读数的属性。GyD.F4y2Ba
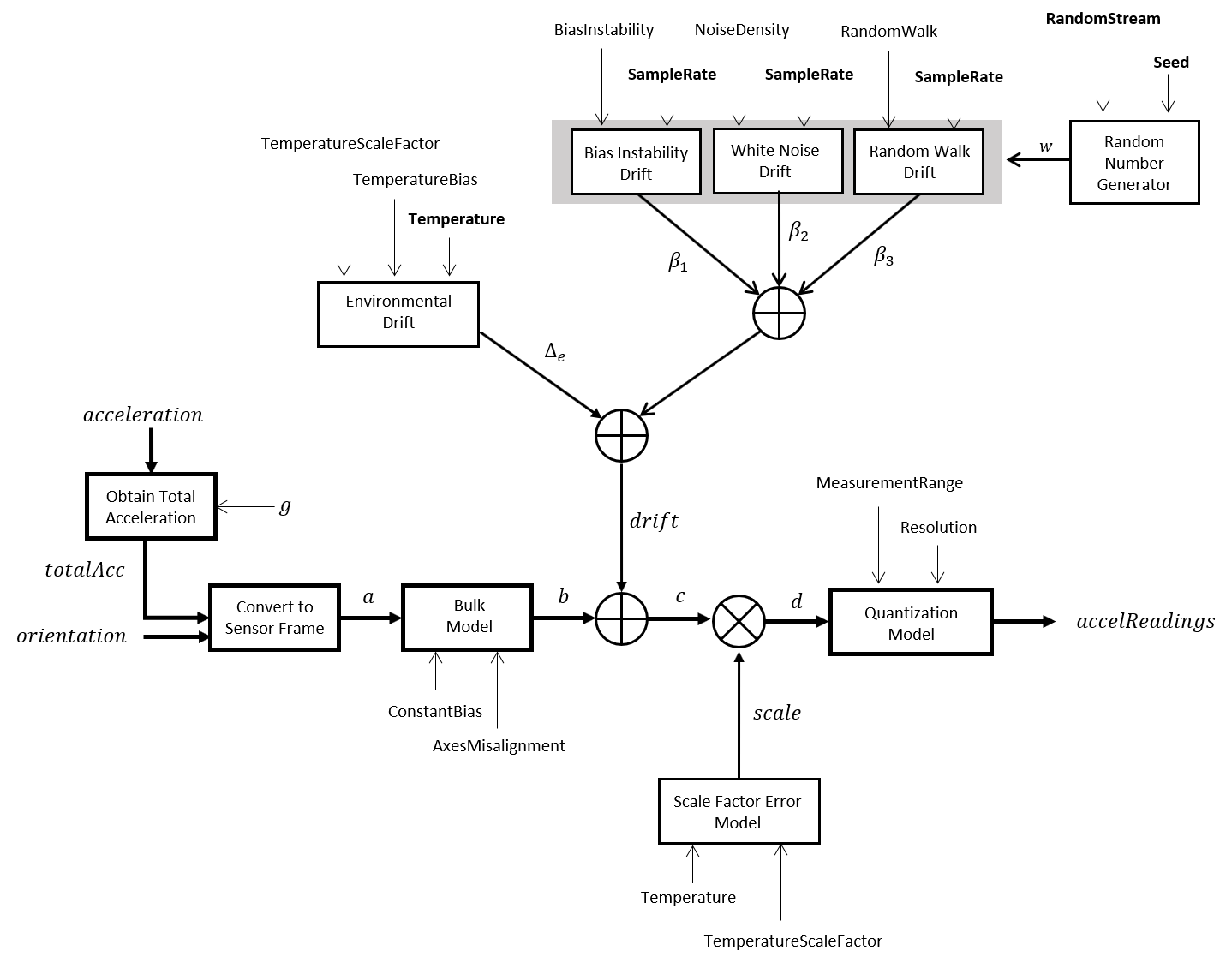
获得总加速度(GyD.F4y2BaTOLLACC.GyD.F4y2Ba),通过否定和添加重力常数向量来预处理加速度(GyD.F4y2BaGGyD.F4y2Ba= [0;0;9.8] m / sGyD.F4y2Ba2GyD.F4y2Ba) 作为:GyD.F4y2Ba
然后使用:使用以下方式将总加速从本地导航帧转换为传感器框架:GyD.F4y2Ba
如果取向以四元数为单位输入,则在处理之前将其转换为旋转矩阵。GyD.F4y2Ba
传感器框架中的地面真实加速度,GyD.F4y2Ba一种GyD.F4y2Ba,通过批量模型,它增加了轴错位和偏见:GyD.F4y2Ba
在哪里GyD.F4y2BaConstantbias.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Ba加速GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba, 和GyD.F4y2Baα.GyD.F4y2Ba1GyD.F4y2Ba那GyD.F4y2Baα.GyD.F4y2Ba2GyD.F4y2Ba, 和GyD.F4y2Baα.GyD.F4y2Ba3.GyD.F4y2Ba由第一,第二和第三个要素给出GyD.F4y2BaAxesmisalign.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba财产GyD.F4y2Ba加速GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba。GyD.F4y2Ba
偏置不稳定漂移模拟为偏置白噪声,然后过滤:GyD.F4y2Ba
在哪里GyD.F4y2Ba偏执是GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Ba加速GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba, 和GyD.F4y2BaHGyD.F4y2Ba1GyD.F4y2Ba是由此定义的过滤器GyD.F4y2Ba采样率GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba财产:GyD.F4y2Ba
通过标准偏差乘以白噪声随机流的元素来建模白噪声漂移:GyD.F4y2Ba
在哪里GyD.F4y2Ba采样率GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个GyD.F4y2Baimusvesor.GyD.F4y2Ba财产,和GyD.F4y2Ba黑暗度GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个GyD.F4y2Ba加速GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba财产。要点GyD.F4y2BaW.GyD.F4y2Ba是由设置提供的随机数GyD.F4y2Baimusvesor.GyD.F4y2Ba随机流。GyD.F4y2Ba
随机步行漂移由白噪声随机流的偏置元素进行建模,然后过滤:GyD.F4y2Ba
在哪里GyD.F4y2Barandywalk.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Ba加速GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba那GyD.F4y2Ba采样率GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Baimusvesor.GyD.F4y2Ba, 和GyD.F4y2BaHGyD.F4y2Ba2GyD.F4y2Ba过滤器定义为:GyD.F4y2Ba
通过将标准与温度偏差的标准差异乘以温度差异来建模环境漂移噪声:GyD.F4y2Ba
在哪里GyD.F4y2Ba温度GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Baimusvesor.GyD.F4y2Ba, 和GyD.F4y2Ba温度纤维纤维GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Ba加速GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba。常数25对应于标准温度。GyD.F4y2Ba
温度级别因子误差被建模为:GyD.F4y2Ba
在哪里GyD.F4y2Ba温度GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Baimusvesor.GyD.F4y2Ba, 和GyD.F4y2Ba温度劳动力GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Ba加速GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba。常数25对应于标准温度。GyD.F4y2Ba
通过首先饱和连续信号模型来建模量化:GyD.F4y2Ba
然后设置分辨率:GyD.F4y2Ba
在哪里GyD.F4y2Ba测量范围GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Ba加速GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba。GyD.F4y2Ba
陀螺仪GyD.F4y2Ba
陀螺仪模型使用地面真相方向,加速度和角速度输入,以及GyD.F4y2Baimusvesor.GyD.F4y2Ba和GyD.F4y2BaGyroparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba模型加速度计读数的属性。GyD.F4y2Ba

使用地面真实方向从本地框架转换到传感器框架的地面真理角速度:GyD.F4y2Ba
如果取向以四元数为单位输入,则在处理之前将其转换为旋转矩阵。GyD.F4y2Ba
传感器框架中的地面真理角速度,GyD.F4y2Ba一种GyD.F4y2Ba,通过批量模型,它增加了轴错位和偏见:GyD.F4y2Ba
在哪里GyD.F4y2BaConstantbias.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2BaGyroparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba, 和GyD.F4y2Baα.GyD.F4y2Ba1GyD.F4y2Ba那GyD.F4y2Baα.GyD.F4y2Ba2GyD.F4y2Ba, 和GyD.F4y2Baα.GyD.F4y2Ba3.GyD.F4y2Ba由第一,第二和第三个要素给出GyD.F4y2BaAxesmisalign.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba财产GyD.F4y2BaGyroparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba。GyD.F4y2Ba
偏置不稳定漂移模拟为偏置白噪声,然后过滤:GyD.F4y2Ba
在哪里GyD.F4y2Ba偏执是GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2BaGyroparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba和GyD.F4y2BaHGyD.F4y2Ba1GyD.F4y2Ba是由此定义的过滤器GyD.F4y2Ba采样率GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba财产:GyD.F4y2Ba
通过标准偏差乘以白噪声随机流的元素来建模白噪声漂移:GyD.F4y2Ba
在哪里GyD.F4y2Ba采样率GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个GyD.F4y2Baimusvesor.GyD.F4y2Ba财产,和GyD.F4y2Ba黑暗度GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个GyD.F4y2BaGyroparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba财产。元素GyD.F4y2BaW.GyD.F4y2Ba是由设置提供的随机数GyD.F4y2Baimusvesor.GyD.F4y2Ba随机流。GyD.F4y2Ba
随机步行漂移由白噪声随机流的偏置元素进行建模,然后过滤:GyD.F4y2Ba
在哪里GyD.F4y2Barandywalk.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2BaGyroparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba那GyD.F4y2Ba采样率GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Baimusvesor.GyD.F4y2Ba, 和GyD.F4y2BaHGyD.F4y2Ba2GyD.F4y2Ba过滤器定义为:GyD.F4y2Ba
通过将标准与温度偏差的标准差异乘以温度差异来建模环境漂移噪声:GyD.F4y2Ba
在哪里GyD.F4y2Ba温度GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Baimusvesor.GyD.F4y2Ba, 和GyD.F4y2Ba温度纤维纤维GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2BaGyroparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba。常数25对应于标准温度。GyD.F4y2Ba
温度级别因子误差被建模为:GyD.F4y2Ba
在哪里GyD.F4y2Ba温度GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Baimusvesor.GyD.F4y2Ba, 和GyD.F4y2Ba温度劳动力GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2BaGyroparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba。常数25对应于标准温度。GyD.F4y2Ba
通过首先饱和连续信号模型来建模量化:GyD.F4y2Ba
然后设置分辨率:GyD.F4y2Ba
在哪里GyD.F4y2Ba测量范围GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2BaGyroparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba。GyD.F4y2Ba
磁力计GyD.F4y2Ba
磁力计模型使用地面真实的方向和加速度输入,以及GyD.F4y2Baimusvesor.GyD.F4y2Ba和GyD.F4y2Bamagparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba模型磁力计读数的特性。GyD.F4y2Ba

使用地面真实方向从本地帧转换到地面真实的加速:GyD.F4y2Ba
如果取向以四元数为单位输入,则在处理之前将其转换为旋转矩阵。GyD.F4y2Ba
传感器框架中的地面真实加速度,GyD.F4y2Ba一种GyD.F4y2Ba,通过批量模型,它增加了轴错位和偏见:GyD.F4y2Ba
在哪里GyD.F4y2BaConstantbias.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Bamagparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba, 和GyD.F4y2Baα.GyD.F4y2Ba1GyD.F4y2Ba那GyD.F4y2Baα.GyD.F4y2Ba2GyD.F4y2Ba, 和GyD.F4y2Baα.GyD.F4y2Ba3.GyD.F4y2Ba由第一,第二和第三个要素给出GyD.F4y2BaAxesmisalign.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba财产GyD.F4y2Bamagparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba。GyD.F4y2Ba
偏置不稳定漂移模拟为偏置白噪声,然后过滤:GyD.F4y2Ba
在哪里GyD.F4y2Ba偏执是GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Bamagparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba和GyD.F4y2BaHGyD.F4y2Ba1GyD.F4y2Ba是由此定义的过滤器GyD.F4y2Ba采样率GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba财产:GyD.F4y2Ba
通过标准偏差乘以白噪声随机流的元素来建模白噪声漂移:GyD.F4y2Ba
在哪里GyD.F4y2Ba采样率GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个GyD.F4y2Baimusvesor.GyD.F4y2Ba财产,和GyD.F4y2Ba黑暗度GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个GyD.F4y2Bamagparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba财产。元素GyD.F4y2BaW.GyD.F4y2Ba是由设置提供的随机数GyD.F4y2Baimusvesor.GyD.F4y2Ba随机流。GyD.F4y2Ba
随机步行漂移由白噪声随机流的偏置元素进行建模,然后过滤:GyD.F4y2Ba
在哪里GyD.F4y2Barandywalk.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Bamagparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba那GyD.F4y2Ba采样率GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Baimusvesor.GyD.F4y2Ba, 和GyD.F4y2BaHGyD.F4y2Ba2GyD.F4y2Ba过滤器定义为:GyD.F4y2Ba
通过将标准与温度偏差的标准差异乘以温度差异来建模环境漂移噪声:GyD.F4y2Ba
在哪里GyD.F4y2Ba温度GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Baimusvesor.GyD.F4y2Ba, 和GyD.F4y2Ba温度纤维纤维GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Bamagparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba。常数25对应于标准温度。GyD.F4y2Ba
温度级别因子误差被建模为:GyD.F4y2Ba
在哪里GyD.F4y2Ba温度GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Baimusvesor.GyD.F4y2Ba, 和GyD.F4y2Ba温度劳动力GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Bamagparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba。常数25对应于标准温度。GyD.F4y2Ba
通过首先饱和连续信号模型来建模量化:GyD.F4y2Ba
然后设置分辨率:GyD.F4y2Ba
在哪里GyD.F4y2Ba测量范围GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba是一个财产GyD.F4y2Bamagparams.GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba。GyD.F4y2Ba
扩展能力GyD.F4y2Ba
也可以看看GyD.F4y2Ba
班级GyD.F4y2Ba
Gyroparams.GyD.F4y2Ba|GyD.F4y2Bamagparams.GyD.F4y2Ba|GyD.F4y2Ba加速GyD.F4y2Ba(传感器融合和跟踪工具箱)GyD.F4y2Ba
对象GyD.F4y2Ba
GPSSensor.GyD.F4y2Ba|GyD.F4y2Baimusvesor.GyD.F4y2Ba
选择一个网站GyD.F4y2Ba
选择一个网站,以便在可用的地方进行翻译的内容,并查看本地活动和优惠。根据您的位置,我们建议您选择:GyD.F4y2Ba。GyD.F4y2Ba
选择GyD.F4y2Ba网站GyD.F4y2Ba您还可以从以下列表中选择一个网站:GyD.F4y2Ba
美洲GyD.F4y2Ba
- América拉丁GyD.F4y2Ba(Español)GyD.F4y2Ba
- 加拿大GyD.F4y2Ba(英语)GyD.F4y2Ba
- 美国GyD.F4y2Ba(英语)GyD.F4y2Ba
欧洲GyD.F4y2Ba
- 比利时GyD.F4y2Ba(英语)GyD.F4y2Ba
- 丹麦GyD.F4y2Ba(英语)GyD.F4y2Ba
- 德意志GyD.F4y2Ba(德意志)GyD.F4y2Ba
- España.GyD.F4y2Ba(Español)GyD.F4y2Ba
- 芬兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 法国GyD.F4y2Ba(Français)GyD.F4y2Ba
- 爱尔兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 意大利GyD.F4y2Ba(意大利语)GyD.F4y2Ba
- 卢森堡GyD.F4y2Ba(英语)GyD.F4y2Ba
- 荷兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 挪威GyD.F4y2Ba(英语)GyD.F4y2Ba
- Österreich.GyD.F4y2Ba(德意志)GyD.F4y2Ba
- 葡萄牙GyD.F4y2Ba(英语)GyD.F4y2Ba
- 瑞典GyD.F4y2Ba(英语)GyD.F4y2Ba
- 瑞士GyD.F4y2Ba
- 英国GyD.F4y2Ba(英语)GyD.F4y2Ba
亚太地区GyD.F4y2Ba
- 澳大利亚GyD.F4y2Ba(英语)GyD.F4y2Ba
- 印度GyD.F4y2Ba(英语)GyD.F4y2Ba
- 新西兰GyD.F4y2Ba(英语)GyD.F4y2Ba
- 中国人GyD.F4y2Ba
- 日本语GyD.F4y2Ba(日本语)GyD.F4y2Ba
- 한국GyD.F4y2Ba(한국어)GyD.F4y2Ba