明显gydF4y2Ba
从加速度计,陀螺仪和磁力计读数的方向gydF4y2Ba
- 库:gydF4y2Ba
导航工具箱工具箱/多传感器定位/导航过滤器gydF4y2Ba
传感器融合和跟踪工具箱/多传感器定位/导航滤波器gydF4y2Ba

描述gydF4y2Ba
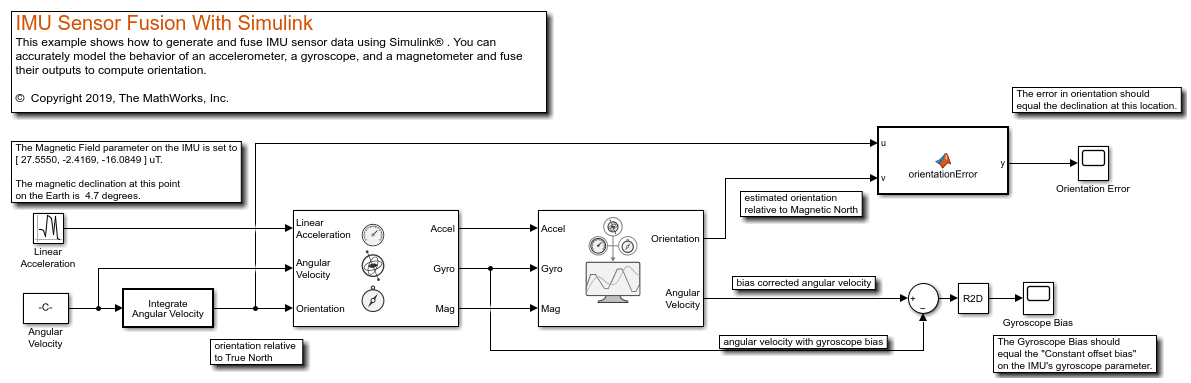
的gydF4y2Ba明显gydF4y2Ba金宝app®gydF4y2Ba块熔断加速度计、磁力计和陀螺仪传感器数据来估计设备方向。gydF4y2Ba
港口gydF4y2Ba
输入gydF4y2Ba
输出gydF4y2Ba
参数gydF4y2Ba
模型的例子gydF4y2Ba
算法gydF4y2Ba
注:以下算法仅适用于NED参考帧。gydF4y2Ba
的gydF4y2Ba明显gydF4y2Ba块采用中描述的九轴卡尔曼滤波结构gydF4y2Ba[1]gydF4y2Ba(传感器融合与跟踪工具箱)gydF4y2Ba.该算法尝试跟踪方向误差、陀螺仪偏移、线加速度和磁干扰,以输出最终方向和角速度。间接卡尔曼滤波器不是直接跟踪方向,而是模拟误差过程,gydF4y2BaxgydF4y2Ba,并进行递归更新:gydF4y2Ba
在哪里gydF4y2BaxgydF4y2BakgydF4y2Ba是一个12乘1的向量,包括:gydF4y2Ba
θgydF4y2BakgydF4y2Ba——3乘1的方向误差矢量,以度数表示gydF4y2BakgydF4y2Ba
bgydF4y2BakgydF4y2Ba–3×1陀螺仪零角速率偏置矢量,单位为度/秒,时间gydF4y2BakgydF4y2Ba
一个gydF4y2BakgydF4y2Ba——在传感器帧中测量的3 × 1加速度误差矢量,单位为g,在时间gydF4y2BakgydF4y2Ba
dgydF4y2BakgydF4y2Ba—在传感器框架中测量的磁干扰误差矢量,以µT表示gydF4y2BakgydF4y2Ba
在哪里gydF4y2BawgydF4y2BakgydF4y2Ba是一个12乘1的加性噪声向量吗gydF4y2BaFgydF4y2BakgydF4y2Ba为状态转换模型。gydF4y2Ba
因为gydF4y2BaxgydF4y2BakgydF4y2Ba定义为错误处理,gydF4y2Ba先天的gydF4y2Ba估计总是零,因此状态转移模型,gydF4y2BaFgydF4y2BakgydF4y2Ba,为零。此洞察导致标准Kalman方程的以下简化:gydF4y2Ba
标准卡尔曼滤波方程:gydF4y2Ba
算法中使用的卡尔曼方程:gydF4y2Ba
地点:gydF4y2Ba
xgydF4y2BakgydF4y2Ba−gydF4y2Ba——预测(gydF4y2Ba先天的gydF4y2Ba)状态估计;错误的过程gydF4y2Ba
PgydF4y2BakgydF4y2Ba−gydF4y2Ba——预测(gydF4y2Ba先天的gydF4y2Ba)估计协方差gydF4y2Ba
ygydF4y2BakgydF4y2Ba——创新gydF4y2Ba
年代gydF4y2BakgydF4y2Ba——创新协方差gydF4y2Ba
KgydF4y2BakgydF4y2Ba——卡尔曼增益gydF4y2Ba
xgydF4y2BakgydF4y2Ba+gydF4y2Ba–更新(gydF4y2Ba后验gydF4y2Ba)状态估计gydF4y2Ba
PgydF4y2BakgydF4y2Ba+gydF4y2Ba–更新(gydF4y2Ba后验gydF4y2Ba)估计协方差gydF4y2Ba
kgydF4y2Ba表示迭代,上标gydF4y2Ba+gydF4y2Ba代表一个gydF4y2Ba后验gydF4y2Ba估计和上标gydF4y2Ba−gydF4y2Ba代表一个gydF4y2Ba先天的gydF4y2Ba估计。gydF4y2Ba
图和下面的步骤描述了通过算法的基于单一帧的迭代。gydF4y2Ba
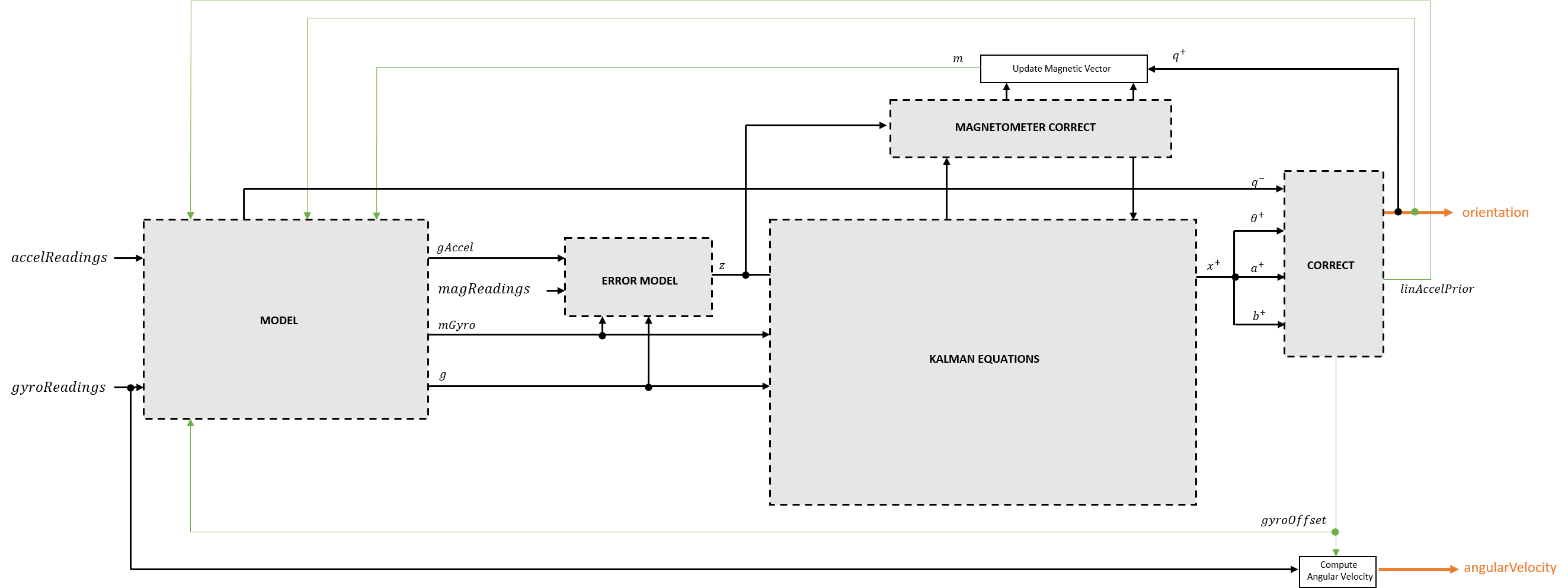
在第一次迭代之前gydF4y2Ba加速度计gydF4y2Ba,gydF4y2BagyroReadingsgydF4y2Ba,gydF4y2BamagReadingsgydF4y2Ba输入被分块gydF4y2Ba决定因素gydF4y2Ba3帧。对于每个块,算法使用当前加速度计和磁力计读数对应的块陀螺仪读数。gydF4y2Ba
详细的概述gydF4y2Ba
浏览算法,了解每个阶段的详细概述。gydF4y2Ba

模型gydF4y2Ba
该算法将加速度和角变化建模为线性过程。gydF4y2Ba

当前帧的方向是通过先估计前一帧的角度变化来预测的:gydF4y2Ba
在哪里gydF4y2BaNgydF4y2Ba抽取因子是由抽取因子和指定的吗gydF4y2BafsgydF4y2Ba为抽样率。gydF4y2Ba
角的变化被转换成四元数gydF4y2BarotvecgydF4y2Ba四元数gydF4y2Ba(传感器融合与跟踪工具箱)gydF4y2Ba施工的语法:gydF4y2Ba
之前的方向估计通过Δ旋转来更新gydF4y2Ba问gydF4y2Ba:gydF4y2Ba
在第一次迭代中,方向估计,gydF4y2Ba问gydF4y2Ba−gydF4y2Ba,由初始化gydF4y2BaecompassgydF4y2Ba(传感器融合与跟踪工具箱)gydF4y2Ba.gydF4y2Ba
重力矢量被解释为四元数的第三列,gydF4y2Ba问gydF4y2Ba−gydF4y2Ba,旋转矩阵形式:gydF4y2Ba
第二个重力矢量估计是通过从加速度计读数中减去前一个迭代的衰减线性加速度估计得出的:gydF4y2Ba
地球的磁矢量是通过旋转从以前的迭代估计的磁矢量来估计的gydF4y2Ba先天的gydF4y2Ba旋转矩阵形式的方向估计:gydF4y2Ba
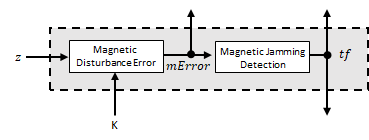
误差模型gydF4y2Ba

误差模型结合了两个不同点:gydF4y2Ba
加速度计读数的重力估计值和陀螺仪读数的重力估计值之间的区别:gydF4y2Ba
从陀螺仪读数估计的磁矢量和从磁力计估计的磁矢量之间的差异:gydF4y2Ba
磁强计正确gydF4y2Ba
磁强计对磁矢量估计中的误差进行校正,从而检测出磁干扰。gydF4y2Ba
通过将与磁矢量相关的卡尔曼增益与误差信号进行矩阵乘法,计算出磁干扰误差:gydF4y2Ba
卡尔曼增益,gydF4y2BaKgydF4y2Ba,是在当前迭代中计算的卡尔曼增益。gydF4y2Ba
通过验证检测到的磁干扰功率小于或等于预期磁场强度功率的4倍来确定是否存在磁干扰:gydF4y2Ba
ExpectedMagneticFieldStrengthgydF4y2Ba(传感器融合与跟踪工具箱)gydF4y2Ba是一种属性gydF4y2BaahrsfiltergydF4y2Ba.gydF4y2Ba
卡尔曼滤波方程gydF4y2Ba
卡尔曼方程使用了从陀螺仪读数得出的重力估计,gydF4y2BaggydF4y2Ba,由陀螺仪读数得出的磁矢量估计,gydF4y2BamGyrogydF4y2Ba,观察误差过程,gydF4y2BazgydF4y2Ba,更新卡尔曼增益和中间协方差矩阵。将卡尔曼增益应用于误差信号,gydF4y2BazgydF4y2Ba,输出gydF4y2Ba后验gydF4y2Ba误差估计,gydF4y2BaxgydF4y2Ba+gydF4y2Ba.gydF4y2Ba

观测模型映射出1乘3的观测状态,gydF4y2BaggydF4y2Ba和gydF4y2BamGyrogydF4y2Ba,进入6乘12的真实状态,gydF4y2BaHgydF4y2Ba.gydF4y2Ba
观测模型构造为:gydF4y2Ba
在哪里gydF4y2BaggydF4y2BaxgydF4y2Ba,gydF4y2BaggydF4y2BaygydF4y2Ba,gydF4y2BaggydF4y2BazgydF4y2Ba是吗gydF4y2BaxgydF4y2Ba-,gydF4y2BaygydF4y2Ba- - - - - -,gydF4y2BazgydF4y2Ba-重力矢量的元素由gydF4y2Ba先天的gydF4y2Ba分别为取向。gydF4y2Ba米gydF4y2BaxgydF4y2Ba,gydF4y2Ba米gydF4y2BaygydF4y2Ba,gydF4y2Ba米gydF4y2BazgydF4y2Ba是吗gydF4y2BaxgydF4y2Ba-,gydF4y2BaygydF4y2Ba- - - - - -,gydF4y2BazgydF4y2Ba-磁矢量的元素gydF4y2Ba先天的gydF4y2Ba分别为取向。gydF4y2BaκgydF4y2Ba是由采样率和抽取因子属性确定的常数:gydF4y2BaκgydF4y2Ba=gydF4y2Ba大量毁灭的因素gydF4y2Ba/gydF4y2Ba采样率gydF4y2Ba.gydF4y2Ba
创新协方差是一个6 × 6的矩阵,用于跟踪测量中的可变性。创新协方差矩阵计算为:gydF4y2Ba
在哪里gydF4y2Ba
HgydF4y2Ba观察模型是矩阵吗gydF4y2Ba
PgydF4y2Ba−gydF4y2Ba是预测的(gydF4y2Ba先天的gydF4y2Ba)观测模型在前一次迭代中计算的协方差的估计gydF4y2Ba
RgydF4y2Ba为观测模型噪声的协方差,计算为:gydF4y2Ba
在哪里gydF4y2Ba
和gydF4y2Ba
误差估计协方差是一个12乘12的矩阵,用于跟踪状态的可变性。gydF4y2Ba
误差估计协方差矩阵更新为:gydF4y2Ba
在哪里gydF4y2BaKgydF4y2Ba是卡尔曼增益,gydF4y2BaHgydF4y2Ba是测量矩阵,并且gydF4y2BaPgydF4y2Ba−gydF4y2Ba为前一次迭代中计算的误差估计协方差。gydF4y2Ba
误差估计协方差是一个12乘12的矩阵,用于跟踪状态的可变性。的gydF4y2Ba先天的gydF4y2Ba错误估计协方差,gydF4y2BaPgydF4y2Ba−gydF4y2Ba,为过程噪声协方差,gydF4y2Ba问gydF4y2Ba,在之前的迭代中确定。gydF4y2Ba问gydF4y2Ba是根据gydF4y2Ba后验gydF4y2Ba错误估计协方差,gydF4y2BaPgydF4y2Ba+gydF4y2Ba.在计算gydF4y2Ba问gydF4y2Ba,假设互相关项与自相关项相比可忽略不计,并设置为零:gydF4y2Ba
在哪里gydF4y2Ba
PgydF4y2Ba+gydF4y2Ba——是更新的(gydF4y2Ba后验gydF4y2Ba)误差估计协方差gydF4y2Ba
κgydF4y2Ba抽取因子除以抽样率。gydF4y2Ba
βgydF4y2Ba——陀螺仪漂移噪声。gydF4y2Ba
ηgydF4y2Ba——陀螺仪噪声。gydF4y2Ba
νgydF4y2Ba——线性加速度衰减因子。gydF4y2Ba
ξgydF4y2Ba——线性加速度噪声。gydF4y2Ba
σgydF4y2Ba——磁干扰衰减因子。gydF4y2Ba
γgydF4y2Ba–磁干扰噪声。gydF4y2Ba
卡尔曼增益矩阵是一个12乘6的矩阵,用于对创新进行加权。在这个算法中,创新被解释为误差过程,gydF4y2BazgydF4y2Ba.gydF4y2Ba
卡尔曼增益矩阵构造为:gydF4y2Ba
在哪里gydF4y2Ba
PgydF4y2Ba−gydF4y2Ba——预测误差协方差gydF4y2Ba
HgydF4y2Ba——观察模型gydF4y2Ba
年代gydF4y2Ba——创新协方差gydF4y2Ba
的gydF4y2Ba一个后gydF4y2Ba误差估计由卡尔曼增益矩阵与重力矢量和磁矢量估计中的误差相结合确定:gydF4y2Ba
如果在当前迭代中检测到磁干扰,则忽略磁矢量误差信号gydF4y2Ba一个后gydF4y2Ba误差估计计算为:gydF4y2Ba
正确的gydF4y2Ba

将之前的估计乘以误差来更新方向估计:gydF4y2Ba
线性加速度估计的更新方法是将线性加速度估计从之前的迭代中衰减并减去误差:gydF4y2Ba
在哪里gydF4y2Ba
νgydF4y2Ba——线性加速度衰减因子gydF4y2Ba
通过将之前迭代的陀螺仪偏移量减去陀螺仪偏移量误差来更新陀螺仪偏移量估计:gydF4y2Ba
工具书类gydF4y2Ba
[1]开源传感器融合。gydF4y2Bahttps://github.com/memsindustrygroup/Open-Source-Sensor-Fusion/tree/master/docsgydF4y2Ba
Roetenberg, D., H.J. Luinge, C.T.M. Baten和P.H. Veltink。磁扰动补偿改善了人体节段定位的惯性和磁传感。gydF4y2Ba神经系统与康复工程学报gydF4y2Ba.卷。13。2005年第3期,第395-405页。gydF4y2Ba
扩展功能gydF4y2Ba
另请参阅gydF4y2Ba
ahrsfiltergydF4y2Ba|gydF4y2BaecompassgydF4y2Ba|gydF4y2BagpsSensorgydF4y2Ba|gydF4y2BaimufiltergydF4y2Ba|gydF4y2BaimuSensorgydF4y2Ba
选择网站gydF4y2Ba
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:gydF4y2Ba.gydF4y2Ba
选择gydF4y2Ba网站gydF4y2Ba你也可以从以下列表中选择一个网站:gydF4y2Ba
美洲gydF4y2Ba
- 拉丁美洲美洲gydF4y2Ba(西班牙语)gydF4y2Ba
- 加拿大gydF4y2Ba(英语)gydF4y2Ba
- 美国gydF4y2Ba(英语)gydF4y2Ba
欧洲gydF4y2Ba
- 比利时gydF4y2Ba(英语)gydF4y2Ba
- 丹麦gydF4y2Ba(英语)gydF4y2Ba
- 德国gydF4y2Ba(德语)gydF4y2Ba
- 西班牙gydF4y2Ba(西班牙语)gydF4y2Ba
- 芬兰gydF4y2Ba(英语)gydF4y2Ba
- 法国gydF4y2Ba(法语)gydF4y2Ba
- 爱尔兰gydF4y2Ba(英语)gydF4y2Ba
- 意大利gydF4y2Ba(意大利语)gydF4y2Ba
- 卢森堡gydF4y2Ba(英语)gydF4y2Ba
- 荷兰gydF4y2Ba(英语)gydF4y2Ba
- 挪威gydF4y2Ba(英语)gydF4y2Ba
- 奥地利gydF4y2Ba(德语)gydF4y2Ba
- 葡萄牙gydF4y2Ba(英语)gydF4y2Ba
- 瑞典gydF4y2Ba(英语)gydF4y2Ba
- 瑞士gydF4y2Ba
- 大不列颠联合王国gydF4y2Ba(英语)gydF4y2Ba
亚太地区gydF4y2Ba
- 澳大利亚gydF4y2Ba(英语)gydF4y2Ba
- 印度gydF4y2Ba(英语)gydF4y2Ba
- 新西兰gydF4y2Ba(英语)gydF4y2Ba
- 中国gydF4y2Ba
- 日本gydF4y2Ba(日本語)gydF4y2Ba
- 한국gydF4y2Ba(한국어)gydF4y2Ba