ecompass
从磁强计和加速度计读数方向
语法
描述
取向= ecompass (accelerometerReading,magnetometerReading)四元数可以从父母(NED)坐标系旋转量一个孩子(传感器)框架。
取向= ecompass (accelerometerReading,magnetometerReading,orientationFormat)四元数或旋转矩阵。
取向= ecompass (accelerometerReading,magnetometerReading,orientationFormat,“ReferenceFrame”,RF)射频的取向输出。指定射频作为NED的(North-East-Down)或“ENU表示”(East-North-Up)。默认值是NED的。
例子
确定偏差的波士顿
使用已知的磁场强度和适当的加速设备指出真北在波士顿的磁偏角波士顿。
定义在波士顿已知的加速和磁场强度。
magneticFieldStrength = (19.535 -5.109 47.930);properAcceleration = [0 0 9.8];
通过磁场强度和加速度ecompass函数。的ecompass函数返回一个旋转四元数运算符。四元数转换为欧拉角的度。
q = ecompass (properAcceleration magneticFieldStrength);e = eulerd (q,“ZYX股票”,“帧”);
的角度,e,代表真北的夹角和磁北在波士顿。按照惯例,磁偏负当磁北真北以西。否定的角度来确定磁偏。
magneticDeclinationOfBoston = - e (1)
magneticDeclinationOfBoston = -14.6563
返回旋转矩阵
的ecompass功能融合磁强计和加速度计数据返回一个四元数,在旋转四元数算子中使用时,可以旋转量从父母(NED)对一个孩子来说帧。的ecompass函数可以返回执行等效旋转的旋转矩阵的四元数运算符。
定义一个旋转,可以把一个父框架指向磁北子帧指向地理北极。定义旋转四元数和旋转矩阵。然后,四元数与旋转矩阵转化为欧拉角的度比较。
定义的磁场强度microteslas在波士顿,MA,指出真正的北方。
m = 19.535 (-5.109 - 47.930);一个= [0 0 9.8];
确定四元数和旋转矩阵的旋转框架从磁北真北。显示结果的比较。
q = ecompass (a, m);quaterionEulerAngles = eulerd (q,“ZYX股票”,“帧”)
quaterionEulerAngles =1×314.6563 0 0
r = ecompass (a, m,“rotmat”);θ=最佳(r (1、3));ψ=量化(r (2、3) / cos(θ)、r (3,3) / cos(θ));ρ=量化(r (1、2) / cos(θ)、r (1,1) / cos(θ));rotmatEulerAngles = rad2deg((ρ,θ,psi))
rotmatEulerAngles =1×314.6563 0 0
确定重力向量
使用ecompass确定基于数据从一个旋转的IMU的重力向量。
负载惯性测量单元(IMU)的数据。
负载“rpy_9axis.mat”sensorDataFs
确定传感器的身体的方向相对于当地NED框架。
取向= ecompass (sensorData.Acceleration sensorData.MagneticField);
首先估计重力向量,旋转的加速度计读数传感器车身骨架NED框架使用取向四元数向量。
gravityVectors = rotatepoint(定位、sensorData.Acceleration);
确定重力矢量的平均恢复重力向量。
gravityVectorEstimate =意味着(gravityVectors, 1)
gravityVectorEstimate =1×30.0000 -0.0000 10.2102
跟踪旋转平台
融合建模加速度计和陀螺仪数据跟踪一个旋转平台使用理想化和真实的数据。
生成真实轨迹
随着时间的推移真实描述平台的定位。使用kinematicTrajectory系统对象™创建一个轨迹为一个平台,没有翻译和旋转的z设在。
时间= 12;fs = 100;numSamples = f *时间;accelerationBody = 0 (numSamples, 3);angularVelocityBody = 0 (numSamples, 3);zAxisAngularVelocity = [linspace(4 0 4 *π* fs), 4 *π* (1,4 * fs), linspace(4 *π,0,4 * fs)] ';angularVelocityBody (:, 3) = zAxisAngularVelocity;轨迹= kinematicTrajectory (“SampleRate”fs);[取向,~ ~,加速度,angularVelocityNED] =轨迹(accelerationBody angularVelocityBody);
接收IMU数据模型
使用一个imuSensor系统对象来模拟数据收到一个包含理想磁强计和IMU理想加速度计。
IMU = imuSensor (“accel-mag”,“SampleRate”fs);[accelerometerData, magnetometerData] = IMU(加速度,…angularVelocityNED,…取向);
IMU数据融合估计取向
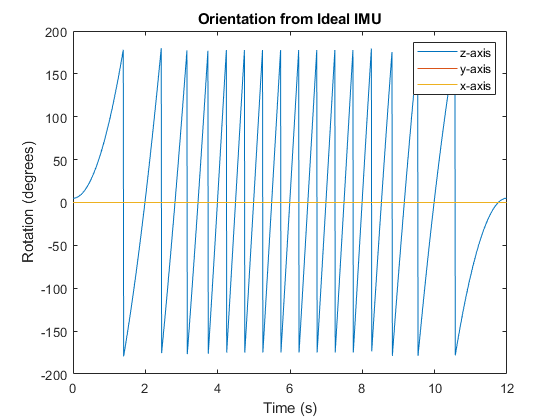
通过加速度计和磁强计数据数据ecompass随着时间的推移函数来估计取向。方向转化为欧拉角度和阴谋的结果。
取向= ecompass (accelerometerData magnetometerData);orientationEuler = eulerd(取向,“ZYX股票”,“帧”);timeVector = (0: numSamples-1)。/ fs;图(1)情节(timeVector orientationEuler)传说(z轴的,“轴”,“轴”)包含(“时间(s)”)ylabel (的旋转(度))标题(“从理想IMU取向”)
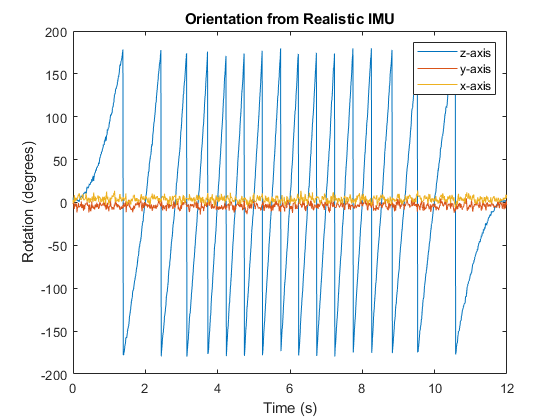
重复实验与现实的IMU传感器模型
修改参数IMU系统对象近似真实的IMU传感器数据。重置IMU然后称之为真实具有相同加速度,角速度和取向。使用ecompass保险丝IMU数据和策划的结果。
IMU。加速度计= accelparams (…“MeasurementRange”,20岁,…“决议”,0.0006,…“ConstantBias”,0.5,…“AxesMisalignment”2,…“NoiseDensity”,0.004,…“BiasInstability”,0.5);IMU。磁强计= magparams (…“MeasurementRange”,200,…“决议”,0.01);重置(IMU) [accelerometerData magnetometerData] = IMU(加速度、angularVelocityNED取向);取向= ecompass (accelerometerData magnetometerData);orientationEuler = eulerd(取向,“ZYX股票”,“帧”);图(2)情节(timeVector orientationEuler)传说(z轴的,“轴”,“轴”)包含(“时间(s)”)ylabel (的旋转(度))标题(“从现实的IMU取向”)
输入参数
输出参数
算法
的ecompass函数返回一个四元数或旋转矩阵旋转量从父母(例如NED)框架对一个孩子(传感器)框架。对于面向输出格式,旋转操作符是由计算旋转矩阵。
首先计算旋转矩阵与一个中介:
然后列正常化。一个和米是accelerometerReading输入和magnetometerReading分别输入。
理解旋转矩阵的计算,考虑地球上任意点及其对应的本地NED框架。假设一个传感器车身骨架,x,y,z),相同的起源。

回想一下,定位传感器的身体被定义为旋转操作符(旋转矩阵或四元数)需要从父母(NED)框架旋转量对一个孩子来说(传感器)框架:
在哪里
R3 x3的旋转矩阵,可以解释为子帧的方向。
p父在父框架是一个3×1的向量。
p孩子是一个3×1向量的子帧。
稳定的传感器,一个加速度计返回重力加速度。如果传感器的身体是完全符合NED坐标系统,重力加速度沿z设在,加速度计读取(0 0 1)。考虑所需的旋转矩阵NED坐标系的旋转量的数量表示加速度计。

第三列的旋转矩阵对应于加速度计读数:
磁强计读数指向磁北的N- - - - - -D飞机。再次,考虑传感器车身骨架与NED坐标系统保持一致。

根据定义,E设在垂直于N- - - - - -D平面上,因此N⨯D=E在一些振幅比例。如果传感器车身骨架与内德,加速度矢量的加速度计和磁强计的磁场矢量在撒谎N- - - - - -D飞机。因此米⨯一个=y,再用一些振幅比例。
考虑所需的旋转矩阵旋转NED孩子,(xyz]。

第二列的旋转矩阵对应的外积加速度计阅读和磁强计读数:
通过旋转矩阵的定义,第1列列2和3的叉积:
最后,旋转矩阵归一化列:
请注意
的ecompass算法使用磁北,不是真北,NED坐标系统。