相移Beamformer
窄带相移beamformer
- 库:
相控阵系统工具箱/波束形成
描述
的相移BeamformerBlock执行延迟和和波束形成。在时域上采用相移近似方法对延迟进行近似。
港口
输入
输出
参数
权重规范方法—指定权重归一化方法
无失真(默认)|保持权力
指定此参数可设置权重归一化方法。选择无失真将波束形成方向的增益设置为零dB。选择保持权力将权重的标准值设置为1。
输入模式坐标系统-定制天线图的坐标系
az-el(默认)|phi-theta
指定的定制天线方向图坐标系统az-el或phi-theta.当你指定az-el,可以使用方位角度(度)和海拔高度角(度)参数来指定模式点的坐标。当你指定phi-theta,可以使用φ角(度)和θ角(度)参数来指定模式点的坐标。
依赖关系
要启用该参数,请设置元素类型来定制天线.
φ角(度)-自定义天线辐射图的Phi角坐标
0:360|实值1 -P行向量
指定天线辐射方向图的点的角度,指定为实值1-by-P行向量。P必须大于2。角的单位是度。角度必须在0°和360°之间,并且严格递增。
依赖关系
要启用该参数,请设置元素类型参数定制天线和输入模式坐标系统参数phi-theta.
θ角(度)-自定义天线辐射图的角坐标
0:180|实值1 -问行向量
指定天线辐射方向图的点的角度,指定为实值1-by-问行向量。问必须大于2。角的单位是度。角度必须在0°和360°之间,并且严格递增。
依赖关系
要启用该参数,请设置元素类型参数定制天线和输入模式坐标系统参数phi-theta.
MatchArrayNormal-旋转天线元件到阵列正常
在(默认)|从
选择此复选框可旋转天线单元图案使其与阵列法线对齐。当未被选中时,元素模式不会旋转。
当天线使用在天线阵和输入模式坐标系统参数是az-el,选中此复选框将旋转该模式,以便x沿着数组法线的元素坐标系统点的-轴。不选择使用没有旋转的元素模式。
当天线用于天线阵和输入模式坐标系统被设置为phi-theta,选中此复选框将旋转该模式,以便z沿着数组法线的元素坐标系统点的-轴。
将参数与数组正常参数的URA所言和UCA数组。
依赖关系
要启用该参数,请设置元素类型来定制天线.
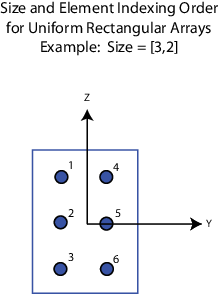
URA数组的维数,指定为正整数或正整数的1 × 2向量。
如果数组大小一个1 × 2的向量,这个向量有这个形式吗
[NumberOfArrayRows, NumberOfArrayColumns].如果数组大小为整数时,该数组具有相同的行数和列数。
当您设置指定传感器阵列为来
复制子数组,此参数应用于每个子数组。
对于一个URA,数组元素沿着最左边的列从上到下建立索引,然后从左到右继续到下一列。在这个图中数组大小的价值(3 2)创建具有三行两列的数组。
依赖关系
要启用该参数,请设置几何来URA所言.
矩形子阵列网格大小,指定为单个正整数或1乘2的正整数行向量。
如果网格大小是整数标量,则数组在每行和每列中具有相同数目的子数组。如果网格大小是这种形式的1 × 2向量吗[NumberOfRows, NumberOfColumns],第一个条目是每一列的子数组数。第二个条目是每行中的子数组数。一排是沿着本地的y-轴,一列沿局部z设在。图中显示了如何使用a复制3 × 2的URA子数组网格大小的[1,2].

依赖关系
要启用该参数,请设置传感器阵列来复制子数组和子阵布局来矩形.
模型的例子

你也可以从以下列表中选择一个网站:
