URA所言总和和差单脉冲
和差单脉冲为URA所言
图书馆
到达方向(DOA)
phaseddoalib
描述
的URA所言和差单脉冲块一个窄带信号的到达方向估计均匀矩形数组(URA所言)基于最初想通过和差单脉冲的算法。块获得不同转向phase-reversing下半年向量的总和转向向量。
参数
- 信号传播速度(米/秒)
-
指定信号的传播速度,在米每秒,作为一个积极的标量。您可以使用函数
physconst指定光速。 - 操作频率(赫兹)
-
指定系统的工作频率,在赫兹,作为一个积极的标量。
- 在相移的比特数
-
用于数字转换的比特数的相移分量beamformer或转向向量权重。指定的比特数是一个非负整数。值0表示没有进行量化。
- 模拟使用
-
块模拟方法,指定为
解释执行或代码生成。如果你想让你的块使用MATLAB®翻译,选择解释执行。如果你想让你的块运行编译后的代码,选择代码生成。编译后的代码需要时间来编译,但通常运行得更快。解释执行是非常有用的,当你开发和优化模型。屏蔽底层运行系统对象在MATLAB™。你可以改变并迅速执行您的模型。当你感到满意的结果,然后可以运行使用
代码生成。长模拟跑得比他们快解释执行。你可以重复执行不重新编译运行。然而,如果你改变任何参数,那么块自动重编译之前执行。设置这个参数时,必须考虑到整体模型模拟模式。表显示了模拟使用参数与整体模拟模式。
当仿真软件金宝app®模型是在
加速器模式中,使用指定的块模式模拟使用覆盖仿真模式。加速度模式
块模拟 模拟的行为 正常的加速器快速的加速器解释执行块使用MATLAB解释器执行。 块使用MATLAB解释器执行。 从模型中创建一个独立的可执行文件。 代码生成块被编译。 模型中的所有模块编译。 有关更多信息,请参见选择一个模拟模式(金宝app模型)。
数组参数
- 传感器阵列指定为
-
指定一个齿龈传感器阵列直接或通过使用MATLAB的表情。
类型
数组(无子序列)MATLAB的表情 - 数组大小
-
指定数组的大小作为一个正整数或正整数1×2向量。
如果数组大小是一个1×2向量,向量的形式
[NumberOfArrayRows, NumberOfArrayColumns]。如果数组大小是一个整数,该数组具有相同的行和列的数量。
元素从上到下沿着列建立索引,并继续下一列从左到右。在这个图中,一个数组大小的
(3 2)产生一个数组有三行和两列。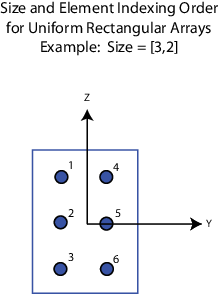
- 元素间距
-
指定数组的元素间距,在米,1×2向量或一个标量。如果元素间距是一个1×2向量,向量的形式
[SpacingBetweenRows, SpacingBetweenColumns]。讨论这些量,请参阅phased.URA。如果元素间距是一个标量,行和列之间的间距相等。 - 元素晶格
-
晶格的指定元素
矩形或三角。矩形——将所有元素的行和列的方向。三角一个矩形点阵的偶数行元素——转向positive-row轴方向。一半的元素的元素转移距离沿着行间距。
- 数组正常,
-
这个参数出现当你设定几何来
URA所言或UCA。指定数组正常作为x,y,或z。URA所言,UCA放在数组元素yz,zx,或xy飞机分别数组的坐标系统。 - 锥形
-
蜡烛,也被称为元素的权重应用于传感器元素的数组。蜡烛是用来修改的振幅和相位传输或接收数据。
指定元素逐渐减少复值标量或复数米——- - - - - -N矩阵。在这个矩阵,米元素的数量吗z设在,N元素的数量吗y设在。米和N对应的值
[NumberofRows, NumberOfColumns]在数组大小矩阵。如果锥形是一个标量,同样的重量是应用于每个元素。如果该值的锥形是一个矩阵,矩阵的权重应用于相应的传感元件。重量必须应用于传感器阵列中的每个元素。 - 表达式
-
一个有效的MATLAB表达式包含一个构造函数为一个统一的矩形数组,例如,
phased.URA。

传感器阵列选项卡:元素的参数
- 元素类型
-
天线或麦克风类型指定为
各向同性天线余弦天线定制天线全向麦克风定制的麦克风
- 指数余弦模式
-
这个参数出现当你设定元素类型来
余弦天线。余弦函数的指数模式指定为一个标量或1×2向量。你必须所有的值指定为非负实数。当您设置指数余弦模式一个标量,方位方向余弦模式和垂直方向余弦模式设置为指定的值。当您设置指数余弦模式1×2向量的第一个元素是方位方向余弦的指数模式,第二个元素是垂直方向余弦的指数模式。
- 操作频率(赫兹)
-
这个参数出现在元素类型被设置为
各向同性天线,余弦天线,或全向麦克风。指定操作频率范围,在天线元素作为1×2赫兹,行向量的形式
[下界,UpperBound]。天线元素没有反应在指定的频率范围之外。 - 操作频率向量(赫兹)
-
这个参数出现在元素类型被设置为
定制天线或定制的麦克风。指定频率,在赫兹,设置天线和1 -麦克风频率响应l行向量增加价值。使用频率响应设置频率响应。天线或麦克风元素没有指定的响应频率范围外的最小和最大的元素操作频率向量(赫兹)。
- 频率响应(dB)
-
这个参数出现在元素类型被设置为
定制天线或定制的麦克风。该参数指定为天线的频率响应或麦克风,以分贝为定义的频率操作频率向量(赫兹)。指定频率响应(dB)1,l向量匹配向量中指定的尺寸操作频率向量(赫兹)。
- 输入模式坐标系统
-
坐标系统的定制天线模式,指定
az-el或phi-theta。当你指定az-el,可以使用方位角度(度)和海拔高度角(度)模式的参数来指定坐标点。当你指定phi-theta,可以使用φ角(度)和θ角(度)模式的参数来指定坐标点。 - 方位角度(度)
-
这个参数出现在元素类型被设置为
定制天线和输入模式坐标系统参数设置为az-el。指定的方位角度计算天线辐射图1 -P行向量。P必须大于2。单位在度。方位角度介于-180°和180°和必须在严格增加订单。
- 高度角(度)
-
这个参数出现在元素类型被设置为
定制天线和输入模式坐标系统参数设置为az-el。指定的高度角计算辐射模式1,问向量。问必须大于2。单位在度。海拔角度介于-90°和90°和必须在严格增加订单。
- φ角(度)
-
这个参数出现在元素类型被设置为
定制天线和输入模式坐标系统参数设置为phi-theta。φ角点的指定天线辐射模式,指定1 -P行向量。P必须大于2。单位在度。φ角躺0°、360°之间,必须严格增加订单。
- θ角(度)
-
这个参数出现在元素类型被设置为
定制天线和输入模式坐标系统参数设置为phi-theta。θ角点的指定天线辐射模式,指定1 -问行向量。问必须大于2。单位在度。θ角度介于0°、180°和必须在严格增加订单。
- 级模式(dB)
-
这个参数时出现元素类型被设置为
定制天线。结合天线辐射方向图的大小,指定为一个问——- - - - - -P矩阵或问——- - - - - -P——- - - - - -l数组中。
当输入模式坐标系统参数设置为
az-el,问等于指定的向量的长度高度角(度)参数和P等于指定的向量的长度方位角度(度)参数。当输入模式坐标系统参数设置为
phi-theta,问等于指定的向量的长度θ角(度)参数和P等于指定的向量的长度φ角(度)参数。
的数量l等于的长度操作频率向量(赫兹)。
如果这个参数是一个问——- - - - - -P矩阵,应用相同的模式所有中指定的频率操作频率向量(赫兹)参数。
如果该值是一个问——- - - - - -P——- - - - - -l数组,每个问——- - - - - -P数组中指定一个模式的页面相应的中指定的频率操作频率向量(赫兹)参数。
- 阶段模式(dB)
-
这个参数时出现元素类型被设置为
定制天线。阶段的组合天线辐射模式,指定为一个问——- - - - - -P矩阵或问——- - - - - -P——- - - - - -l数组中。
当输入模式坐标系统参数设置为
az-el,问等于指定的向量的长度高度角(度)参数和P等于指定的向量的长度方位角度(度)参数。当输入模式坐标系统参数设置为
phi-theta,问等于指定的向量的长度θ角(度)参数和P等于指定的向量的长度φ角(度)参数。
的数量l等于的长度操作频率向量(赫兹)。
如果这个参数是一个问——- - - - - -P矩阵,应用相同的模式所有中指定的频率操作频率向量(赫兹)参数。
如果该值是一个问——- - - - - -P——- - - - - -l数组,每个问——- - - - - -P数组中指定一个模式的页面相应的中指定的频率操作频率向量(赫兹)参数。
如果这个参数是一个问——- - - - - -P矩阵,应用相同的模式所有中指定的频率操作频率向量(赫兹)参数。
如果该值是一个问——- - - - - -P——- - - - - -l数组,每个问——- - - - - -P数组中指定一个模式的页面相应的中指定的频率操作频率向量(赫兹)参数。
- MatchArrayNormal
-
这个参数时出现元素类型被设置为
定制天线。选中此复选框后,旋转天线元素模式结合数组正常。没有选择,元素模式时不旋转。
当天线在天线阵列和使用输入模式坐标系统参数是
az-el,选择此复选框旋转,这样的模式x设在沿着数组元素的坐标系统点正常。不选择使用元素模式没有旋转。当在天线阵列和使用的天线输入模式坐标系统被设置为
phi-theta,选择此复选框旋转,这样的模式z设在沿着数组元素的坐标系统点正常。使用参数结合数组正常参数的
URA所言和UCA数组。 - 极地模式频率(赫兹)
-
这个参数时出现元素类型被设置为
定制的麦克风。指定的测量频率1×——极地模式米向量。测量频率是在指定的频率范围内操作频率向量(赫兹)参数。频率的单位是赫兹。
- 极地模式角度(度)
-
这个参数出现在元素类型被设置为
定制的麦克风。指定的测量角度极模式,作为1 -N向量。角度从中央传感器测量轴的麦克风,并必须在-180°和180°之间,包容性。
- 极地模式(dB)
-
这个参数出现在元素类型被设置为
定制的麦克风。指定的大小极性模式作为一个麦克风元素米——- - - - - -N矩阵。米是测量频率中指定的数量吗极地模式频率(赫兹)。N是测量角度中指定的数量吗极地模式角度(度)。矩阵的每一行表示极性的大小以相应的频率中指定模式极地模式频率(赫兹)和所有角度中指定极地模式角度(度)。假设模式测量方位平面上。在方位平面,仰角0°和中央传感器轴是0°度方位和0°度仰角。假设极地模式围绕中心轴是对称的。您可以构建麦克风的反应模式从极地在3 d空间模式。
- 挡板后面的元素
-
只有当出现此复选框元素类型参数设置为
各向同性天线或全向麦克风。选中此复选框后,挡板的天线元素。在这种情况下,天线应对所有方位角度超过±90°较宽的一面设置为零。侧向方向定义为0°方位角和0°仰角。
港口
请注意
块的输入和输出端口对应描述的输入和输出参数一步底层系统对象的方法。看到这个页面底部的链接。
| 港口 | 描述 | 金宝app支持的数据类型 |
|---|---|---|
X |
输入信号。 输入矩阵的第一个维度的大小可以改变模拟信号长度的变化。大小会发生变化,例如,在一个脉冲重复频率脉冲波形与变量。 |
双精度浮点 |
引导 |
初步估计到达的方向。 |
双精度浮点 |
盎 |
估计到达的方向。 |
双精度浮点 |
版本历史
介绍了R2014b