直角坐标系中
坐标的定义
构造一个矩形或笛卡儿坐标系统三维空间通过指定三个相互正交的坐标轴。下面的图显示了一个可能的坐标轴的规范。

在空间直角坐标系中指定一个位置在一个给定的坐标系统的命令包含实数,(x,y,z),关于原点(0,0,0)。考虑选择的起源进行了讨论全球和当地坐标系统。
您可以查看包含空间中的一个点,或者说三维欧氏空间的一个向量。视为一个向量空间,坐标轴基向量和向量给出了方向从原点空间中的一个点。每一个向量空间是唯一由基向量的线性组合。最常见的基向量的三维欧几里得空间的标准单位基向量:
符号向量和点
在相控阵系统工具箱™软件,您指定两个坐标轴和点列向量。
请注意
在这个软件中,所有坐标向量是列向量。为了方便起见,格式的文档是列向量(x y z没有转置符号)。
两个向量(x y z),点符号(x,y,z)是可以互换的。解释列向量的向量或点取决于上下文。如果列向量指定坐标系的轴或方向,它是一个矢量。如果列向量指定坐标,这是一个点。
正交的基础和欧几里得范数
任何三个线性无关的向量定义了一个三维空间的基础。然而,这种软件假定您使用的基向量正交的。
标准的距离测量在空间l2规范或欧几里得范数。一个向量的欧几里得范数x y z被定义为:
欧几里得范数给向量的长度测量距离原点的一个直角三角形的斜边。两个向量之间的距离(x0y0z0]和[x1y1z1)是:
坐标轴的方向
给定一组标准正交基向量代表坐标轴,有多种方法来定位轴。下图说明了这样一个方向,称为右撇子坐标系统。坐标轴上的箭头表示积极的方向。

如果你把你的右手,点它积极的一面x设在你的掌心朝积极的一面y设在和扩展你的大拇指,你的大拇指表示的正方向z设在。
旋转和旋转矩阵
在三维空间转换向量,旋转矩阵是经常遇到的。旋转矩阵用于两个感觉:它们可以用来旋转向量到一个新的位置或者他们可以用来旋转坐标的基础上(或坐标系统)进入一个新的。在这种情况下,向量是独处但其组件在新的基础将不同于那些在原来的基础上。在欧氏空间中,有三个基本的旋转:分别在x, y和z轴。规定每旋转一个角度旋转。旋转角度定义时要积极为逆时针旋转沿旋转轴被观察者看向原点。任意旋转可以结合这三种组成(欧拉转动定理)。例如,你可以在任何方向使用旋转矢量序列的三个旋转: 。
旋转矢量的旋转矩阵在x, y,和z轴是由:
逆时针绕轴旋转
逆时针绕轴旋转
逆时针绕z轴旋转
以下三个数据显示为每个旋转轴积极的旋转是什么样子:


对于任何旋转,有一个逆旋转满意 。例如,x轴旋转矩阵的逆获得通过改变角的符号:
这个例子说明了一个基本属性:逆旋转矩阵的转置。旋转矩阵满足萨那= 1,因此依据(A) = 1。旋转下,矢量长度保存以及向量之间的角度。
我们可以把旋转的另一种方式。考虑到最初的基向量, 使用旋转矩阵,和旋转一个。这会产生一套新的基向量 相关的原始:
使用转置,您可以编写新的基向量作为一个老基向量的线性组合:
现在任何向量可以写成两组基向量的线性组合:
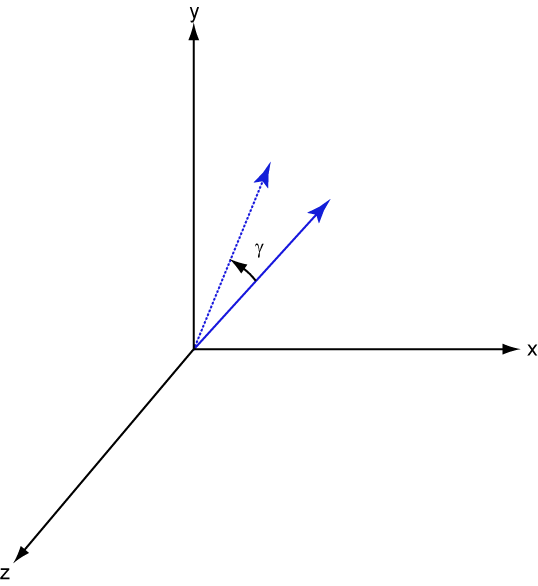
使用代数操作,您可以得到的变换组件固定向量时(或坐标系统)旋转的基础。这个转换使用旋转矩阵的转置。
下一个图说明向量转换坐标系绕x轴旋转。图显示了这个变换后可以解释为一个旋转向量的在相反的方向。

