全局和局部坐标系
全球坐标系
的全球坐标系统描述雷达或声纳模拟发生的竞技场。在这个竞技场中,你可以放置雷达或声纳发射器和接收器,以及目标。这些物体可以是静止的,也可以是运动的。你在全局坐标中指定这些物体的位置和运动。
可以使用舞台系统对象™. 此系统对象使用恒定速度或恒定加速度模型计算对象的位置和速度。
您可以对场景中对象之间传播的信号进行建模。连接发射器、目标和接收器的射线路径在全局坐标中指定。你可以使用这些System对象来传播信号:分阶段自由空间,分阶段。WidebandFreeSpace,分阶段。LOSChannel,或分阶段。WidebandLOSChannel。如果你用twoRayChannel(雷达工具箱)时,边界平面设为z= 0在全球坐标系中。
当地坐标系统
当信号与传感器或目标交互时,交互几乎始终指定为传感器或目标本地坐标的函数。本地坐标系固定到天线和麦克风,相控阵和目标。它们与物体一起移动并旋转。局部坐标通常适应对象的形状和对称性。
由于信号在全局坐标系中传播,因此您需要能够将本地坐标转换为全局坐标。您通过构造一个3×3正交轴的坐标轴来执行此操作。矩阵列表示全局坐标系中的局部坐标的三个正交方向向量。本地坐标系的坐标轴必须是正常的,但它们不需要与全局坐标轴并行。
当你需要计算信号的距离和到达角度时,你可以使用rangeangle函数。当您使用以全球坐标表示的源和接收机位置调用这个函数时,该函数将返回相对于全球系统轴线的距离和到达角度、方位角和仰角。然而,当您将方向矩阵作为附加参数传递时,方位角和仰角现在是根据局部坐标系定义的。
您可以使用局部坐标来指定
阵列天线或麦克风元件的位置和方向。天线阵的波束方向取决于相对于阵列局部坐标的辐射到达或发射角度。
来自目标的反射能量是关于目标局部坐标轴的入射和反射角的函数。
两个局部坐标系的例子是
一架飞机可能有一个与x-轴沿机身轴线与机身轴线对齐y-轴指向左翼。选择z-AXIS形成右手坐标系。
车载平面相控阵列可以具有适于阵列的局部坐标系。的x坐标系的-AXIS可以沿着阵列法向量点点。
下图说明了本地和全局坐标系在双晶雷达场景中的关系。厚实线表示全局坐标系的坐标轴。有两个相位阵列:5×5发送均匀矩形阵列(URA)和5×5接收URA。每个相控阵列都带有自己的本地坐标系。由红色箭头指示的目标还带有局部坐标系。
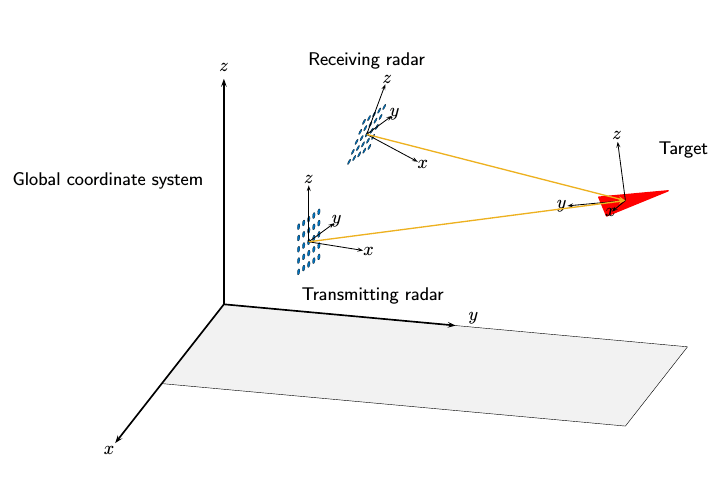
接下来的几节将回顾阵列使用的局部坐标系。
数组的局部坐标系
任何相位阵列系统工具箱阵列的元素的位置始终在本地坐标系中定义。当您使用创建统一阵列的任何系统对象时,阵列元素位置是基于预定义的本地坐标系自动定义的。这个属性持有的阵列是阶段性,淘汰。乌拉,阶段性UCA,异生性扁桃体, 和分阶段。HeterogeneousURA系统对象。对于这些系统对象,使用诸如元素间隔和元素数量的少数参数来描述阵列。然后将元素的位置相对于位于的阵列原点定义(0,0,0)也就是数组的几何中心。几何中心是阵列的一个很好的近似相位中心这个相位中心当在远场观测时,辐射波似乎是从该点发出的。例如,对于具有奇数个元素的ULA,元素位于距离(-二维,- d,0,d,二维)。
有些数组系统对象必须显式指定其元素坐标。您可以使用这些对象创建任意数组形状。这些对象是分阶段。ConformalArray和相位非均匀共形射线系统对象。对于这些阵列,阵列的相位中心不必与阵列原点或几何中心重合。
元素瞄准线的方向。除元件位置外,您还需要指定元件方向,即元件指向的方向。某些元件方向性很强-其大部分辐射能量流向一个方向,称为主响应轴(MRA)。其他是全向的。元素方向是MRA的指向方向。可以使用阵列本地坐标系中的方位角和仰角指定元素方向。天线或麦克风MRA在发送或接收信号时所面对的方向也称为瞄准线或看方向。对于统一阵列,所有元素的所有阻挡方向都由阵列参数确定。对于保形阵列,您可以独立地指定每个元素的阻止方向。
均匀线阵的局部坐标系
阵列原点和相位中心。均匀的线性阵列(ULA)是一系列天线或麦克风元件,其沿直线等距间隔开。在分阶段阵列系统工具箱中,阶段性系统对象创建一个ULA数组。其元素的ULA方向的几何形状由三个参数决定:元素的数量、元素之间的距离和ArrayAxis属性。对于ULA,局部坐标系适用于阵列-元素在局部坐标系中自动分配位置。
元素在数组中的位置由ArrayAxis属于价值的财产“x”,“y”或'Z'这个array axis property determines the axis on which all elements are defined. For example, when theArrayAxis属性设置为“x”,数组元素沿x设在。这些元素相对于原点对称地放置。因此,阵列的几何中心位于坐标系的原点。
此图显示了在局部右手坐标系中具有方向元素的四元素ULA。这些元素位于y-轴的视轴指向x-方向。在本例中ArrayAxis属性设置为“y。

ULA元素轴向。在ULA中,每个元素的瞄准方向都指向同一方向。该方向与阵列轴正交。该方向取决于ArrayAxis财产。
| ArrayAxis属性值 | 元件位置和视轴方向 |
|---|---|
“x” |
数组元素躺在x设在。元素钻石矢量指向y设在。 |
“y” |
数组元素躺在y设在。元素钻石矢量指向x设在。 |
'Z' |
数组元素躺在z设在。元素钻石矢量指向x设在。 |
适应于均匀线性阵列的局部坐标
构造均匀线性阵列的两个示例,并相对于由阵列定义的局部坐标系统显示元件的坐标。
首先,构建一个单元间距为半米的4单元ULA。
苏拉=分阶段。齿龈(“NumElements”4.“ElementSpacing”, 0.5);ElementLocs = getElementPosition(苏拉)
ElementLocs =3×4.0 0 0 0 -0.7500 -0.2500 0.2500 0.7500 0 0 0 0
viewArray(苏拉)

将以阵列为中心的局部坐标系原点设为阵列的相位中心。相位中心是阵列元素位置的平均值。
disp(平均(ElementLocs '))
0 0 0
因为这个阵列有偶数个元素,所以实际上没有一个元素位于相位中心(0,0,0)。
下一步,构建一个5元素的ULA,元素间距为30厘米。
sULA1 =分阶段。齿龈(“NumElements”5.“ElementSpacing”, 0.3);ElementLocs = getElementPosition (sULA1)
ElementLocs =3×5000 00 -0.6000 -0.3000 0 0.3000 000 0
viewArray (sULA1)

因为阵列的每一行和每一列都有奇数个元素,所以阵列的中心元素位于相位中心。
均匀矩形阵列的局部坐标系
阵列原点和相位中心。统一矩形阵列(URA)是放置在规则的二维网格上的天线或麦克风元件阵列。市建局的几何形状、各元素的位置和方位由以下几个参数决定:阵列的尺寸、各元素之间的距离和ArrayNormal.财产。就市建局而言,本地坐标系统会根据数组进行调整,元素会在本地坐标系统中自动分配位置。局部坐标系的原点是数组的几何中心。的相位中心阵列的位置与几何中心重合。元素在此局部坐标系中自动分配位置。位置由ArrayNormal.属于价值的财产“x”,“y”或'Z'。所有元素都位于通过原点并与此属性中指定的轴正交的平面上。例如,当ArrayNormal.属性设置为“x”,数组元素位于yz-平面如图所示。图中显示了一个2乘4的元素URA,各元素之间有间隔d米的距离y和z方向。

元件视轴方向。和ULA一样,市区重建局的每个元素的轴向都指向同一个方向。你可以用ArrayNormal.财产。如上图所示,市建局的ArrayNormal.属性设置为“x”.然后,元件孔瞄准线指向x设在。
| ArrayNormal属性值 | 元件位置和视轴方向 |
|---|---|
“x” |
数组元素躺在yz飞机。元素钻石矢量指向x设在。 |
“y” |
数组元素躺在zx飞机。元素钻石矢量指向y设在。 |
'Z' |
数组元素躺在xy飞机。元素钻石矢量指向z设在。 |
适应于均匀矩形阵列的局部坐标
构造两个均匀矩形阵列示例,并显示元素相对于阵列定义的局部坐标系的坐标。
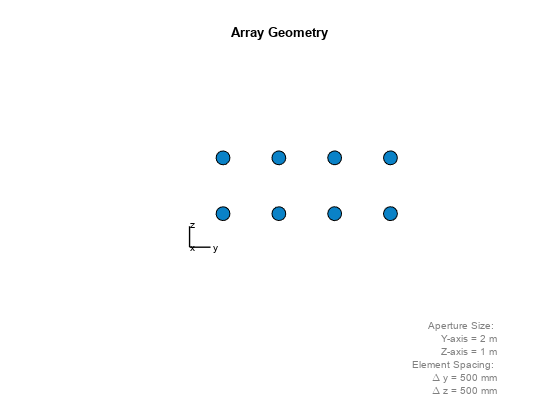
首先,建造一个2乘4的市区重建局,元件间距为半米。
苏拉=分阶段。(精“尺寸”(2 - 4),“ElementSpacing”[0.5 - 0.5]);ElementLocs = getElementPosition(章)
ElementLocs =3×8.0 0 0 0 0 0 0 0 -0.7500 -0.7500 -0.2500 -0.2500 0.2500 0.2500 0.7500 0.7500 0.2500 -0.2500 0.2500 -0.2500 0.2500 -0.2500 0.2500 -0.2500
viewArray(苏拉)
阵列的阶段中心是阵列元件位置的平均值。阵列本地坐标系的原点被设置为阵列的阶段中心。
disp(平均(ElementLocs '))
0 0 0
因为数组的每一行和每一列都有偶数个元素,所以数组中实际上没有元素位于相位中心(0,0,0)。
接下来建造一个5乘3的URA,元素间距为30厘米。
sURA1 =分阶段。(3 [5],“ElementSpacing”,[0.3 0.3]);ElementLocs = GetElementPosition(Sura1)
ElementLocs =3×15000 000 000 000 000 0 -0.3000 -0.3000 -0.3000 -0.3000 -0.3000 000 000 000 000 000 0.3000 0.3000 0.3000 0.3000 0.3000 0.6000 0.6000 0.3000 0 -0.3000 -0.6000 0.3000 0 -0.3000 -0.6000 0.3000
viewArray (sURA1)

因为阵列的每一行和每一列都有奇数个元素,所以阵列的中心元素位于相位中心。
信号从1000米外的点到达阵列+ X.全球坐标系的-轴。本地市建局阵列沿y轴顺时针旋转30度。计算信号在本地阵列轴线上的到达角。
宽松= roty (30);(rng, ang) = rangeangle((1000, 0, 0),(0, 0, 0),松懈)
rng = 1.0000 e + 03
昂=2×10 30.0000
均匀圆阵的局部坐标系
阵列原点和相位中心。均匀的圆形阵列(UCA)是一系列天线或麦克风元件,其围绕圆形的相等角度间隔开。的阶段性UCA系统对象创建UCA的一种特殊情况。在这种情况下,元素瞄准方向指向远离阵列原点的方向,就像车轮的辐条一样。局部坐标系的原点是阵列的几何中心。UCA的几何图形及其元素的位置和方向由三个参数确定:半径数组、元素数和ArrayNormal.财产。这些元素在本地坐标系统中被自动分配位置。位置是由ArrayNormal.属于价值的财产“x”,“y”或'Z'。所有元素都位于通过原点并与此属性中指定的轴正交的平面上。的相位中心数组的形状与几何中心重合。例如ArrayNormal.属性设置为“x”,数组元素位于yz-平面如图所示。可以创建一个更通用的UCA,具有任意的轴向分阶段。ConformalArray系统对象。
这张图显示了一个8元素的UCA,其中元素位于yz飞机。

元素瞄准线的方向。在UCA中定义为阶段性UCA系统对象,元素瞄准方向从阵列原点径向向外指向ArrayNormal.属性设置为“x”,元素触摸方向点径向向外yz飞机。
| ArrayNormal属性值 | 元件位置和视轴方向 |
|---|---|
“x” |
数组元素躺在yz飞机。所有元素的轴向向量都位于yz从原点径向向外点。 |
“y” |
数组元素躺在zx飞机。所有元素的轴向向量都位于zx从原点径向向外点。 |
'Z' |
数组元素躺在xy飞机。所有元素的轴向向量都位于xy从原点径向向外点。 |
保形阵的局部坐标系
阵列原点和相位中心。您可以使用分阶段。ConformalArray创建任意形状的数组。与统一数组的情况不同,必须显式指定元素位置。一个N-element array需要指定N在阵列局部坐标系中的三维坐标。共形阵的原点可以定位在任意一点。共形阵元的轴向不必平行。方位角和仰角决定了轴向的方向是相对于局部坐标系的。阵列的相位中心不需要与几何中心重合。同样的属性也适用于相位非均匀共形射线数组中。
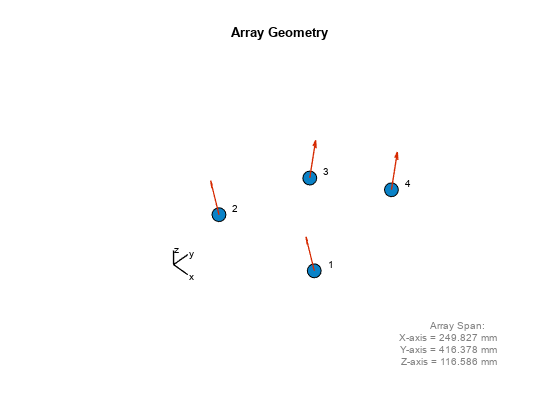
此图显示了四元共形阵的位置和方向。

第4单元共形阵列
使用ConformalArray系统对象构造一个4个元素阵列。假设工作频率为900 MHz。显示阵列几何和普通向量。
fc=900e6;c=物理常数(“光速”); lam=c/fc;x=[1.0,-.5,0,8]*lam/2;y=[-.4,-1.5,1.5]*lam/2;z=[-.3,3,0.4,0]*lam/2;sIso=相控余弦元素(...“频率范围”[0,1 e9]);nv = [-140, -140, 90, 90, 80, 80, 80, 80];sConformArray =分阶段。ConformalArray (“元素”,西索,...“ElementPosition”(x, y, z),...“ElementNormal”, nv);pos = getElementPosition (sConformArray)
位置=3×4.0.1666 -0.0833 0 0.1332 -0.0666 -0.1666 0.0833 0.2498 -0.0500 0.0500 0.0666 0
normvec = getElementnormal(sconformarray)
normvec=2×4-140 -140 90 90 80 80 80 80
ViewArray(SconFormArray,“ShowIndex”,“所有”,“ShowNormal”,真正的)
在全局坐标系和局部坐标系之间转换
在许多阵列处理应用程序中,需要在全局坐标和局部坐标之间进行转换,global2localcoord和local2globalcoord,执行这些转换。
转换局部球面坐标到全局直角坐标
确定目标在全球坐标系中的直角坐标位置。首先,指定目标相对于URA的局部球坐标。URA的中心定义局部坐标系的原点。局部球坐标中的目标位置为方位角30°,仰角45°,射程1000 me、 若要转换为全局直角坐标,请指定局部坐标系原点在全局坐标中的位置。局部坐标系原点距离全局原点(1000500100)m。
将点的坐标转换为全局矩形坐标。从局部球形坐标转换为全局矩形坐标,使用“老”期权的调用local2globalcoord函数。
gCoord = local2globalcoord ([30;45;1000年),“老”, 1000;500;100))
gCoord =3×1103.×1.6124 0.8536 0.8071
目标位于全球坐标系(1612854807)m处。
版权所有2018 Mathworks,Inc。“
将全局直角坐标转换为局部球坐标
以URA阵列的相位中心为中心,在局部球坐标中确定目标的位置。市建局的中心定义了本地坐标系的原点,并拥有全局直角坐标(5000、3000、50)。市建局的局部坐标轴为(0,1,0),(1,0,0), 和(0, 0, 1)。指定目标的全局矩形坐标(1000,500,10)。
将目标坐标转换为局部球面直角坐标。要将全局直角坐标转换为局部球面坐标,请使用“rs”期权的调用global2localcoord函数。
lCoord = global2localcoord ([5000;3000;50),“rs”, 1000;500;100年),...[0 1 0;1 0 0;0 0 -1])
lcoord =3×1103.× 0.0580 0.0006 4.7173
输出具有表单(AZ,EL,RNG)。目标位于58°方位角,0.6°海拔的局部球形坐标,0.6°海拔,4717米。
您还可以从以下列表中选择一个网站:
