phased.Platform
模型平台运动
描述
的phased.Platform系统对象™模型中的一个或多个平台空间的平移运动。一个平台可以是一个目标,如汽车或飞机,或者声纳雷达发射机和接收机。模型假定平台进行平移运动在恒定速度或加速度恒定在每个模拟步骤。中定义的位置和速度总是全球坐标系统。
模型一个移动平台:
请注意
从R2016b开始,而不是使用一步定义的方法来执行操作系统对象,您可以调用对象的参数,就好像它是一个函数。例如,y =步骤(obj, x)和y = obj (x)执行相同操作。
建设
长条木板= phased.Platform创建一个平台系统对象,长条木板。固定平台的对象模型在原点位置和速度设置为零。
长条木板= phased.Platform (创建一个对象,的名字,价值)长条木板,每个指定的属性名设置为指定的值。您可以指定额外的名称-值对参数在任何顺序(Name1,Value1、……以,家)。
长条木板= phased.Platform (对象创建一个平台,pos,韦尔,的名字,价值)长条木板,InitialPosition设置为pos和速度设置为韦尔。其他指定属性名称设置为指定值。的pos和韦尔参数值。值参数不需要指定名称,但根据他们的论点解释立场。指定任何值参数,指定所有前值参数。
运动模型是一个恒定的速度,加速度恒定或自定义轨迹。你可以选择两种运动模式使用MotionModel财产。
| MotionModel价值 | 使用 |
|---|---|
“速度” |
如果你设置 当你设置 |
“加速” |
当你设置 当你设置 |
| “自定义” | 指定平台使用一系列的路径点的运动CustomTrajectory财产。 |
属性
|
对象运动模型 对象运动模型,指定为 默认值: |
|
初始位置的平台 平台的初始位置,指定为一个实值3×1列向量的形式 默认值: |
|
初始速度的平台 初始速度的平台,指定为一个实值3×1列向量的形式 这个属性只适用于当你设置 默认值: |
|
源的速度数据 的速度数据来源,指定为之一 这个属性设置时适用 默认值: |
|
流速的平台 指定当前平台的速度为3×1实值列向量的形式 这个属性设置时适用 默认值: |
|
加速度数据的来源 加速度数据的来源,指定为之一 这个属性设置时适用 默认值: |
|
加速平台 指定当前平台的加速度作为一个实值3×1列向量形式 这个属性设置时适用 默认值: |
|
自定义轨迹锚点。 自定义轨迹路径点,指定为一个实值米——- - - - - -l矩阵,或米——- - - - - -l——- - - - - -N数组中。米锚点的数量。l4或7。
当你设置 要启用这个特性,设置 |
|
机械扫描模式 机械扫描模式平台,指定为 |
|
初始扫描角的平台 初始扫描角平台,指定为1×-N向量,N是平台的数量。扫描平台的发生在局部坐标系。的 例子:(30 40) |
|
方位跨度 作为一个指定的方位角,N2矩阵N是平台的数量。矩阵的每一行指定的扫描范围相应的平台形式 |
|
方位扫描速率 方位扫描速率,指定为1×-N向量,N是平台的数量。向量中的每个条目的方位扫描速率对应的平台。默认值是10度/秒。单位是在度/秒。要启用这个特性,设置 |
|
平台的初始取向轴 的初始取向轴平台,3×3实值指定为正交矩阵为一个平台或一个3-by-3-by -N实值矩阵为多个平台。维度N是平台的数量。3 x3的取向矩阵时,三列代表局部坐标系的坐标轴(某某)。当取向矩阵3-by-3-by -N,对于每一个页面3×3的矩阵指数,结果代表局部坐标系的坐标轴。 默认值: |
|
面向输出轴 获得的瞬时方位轴平台,设置该属性 默认值: |
例子
模拟运动平台
创建一个平台在原点的速度(100100 0)米每秒。模拟运动平台的两个时间步,假设每个步骤的时间是1秒。平台的位置更新后,每一个步骤。
长条木板= phased.Platform ([0;0;0]、[100;100;0]);T = 1;
在第一次调用步骤,位置是在其初始值。
(pos, v) =(长条木板,T)步;pos
pos =3×10 0 0
在第二个调用步骤,位置变化。
(pos, v) =(长条木板,T)步;pos
pos =3×1100 100 0
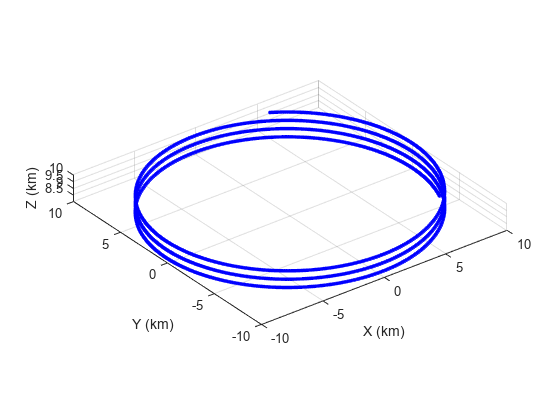
盘旋的飞机运动模型
从飞机开始移动在150公里半径为10公里的圆和下行同时20米/秒的速度。从它的瞬时加速度计算飞机的运动参数一步方法。设置初始定位平台的身份,恰逢全球坐标系统。
设置场景
指定的初始位置和速度飞机。飞机的地面范围10公里,海拔20公里。
= 10000;alt = 20000;initPos = [cosd(60) *范围;信德(60)*范围;alt);originPos = (1000、1000、0) ';originVel = (0, 0, 0) ';vs = 150.0;φ= atan2d (initPos (2) -originPos (2), initPos (1) -originPos (1));phi1φ= + 90;vx = vs * cosd (phi1);v = vs *信德(phi1); initVel = [vx,vy,-20]'; platform = phased.Platform(“MotionModel”,“加速”,…“AccelerationSource”,输入端口的,“InitialPosition”initPos,…“InitialVelocity”initVel,“OrientationAxesOutputPort”,真的,…“InitialOrientationAxes”、眼睛(3));relPos = initPos - originPos;relVel = initVel - originVel;relPos rel2Pos = [relPos (1) (2), 0) ';relVel rel2Vel = [relVel (1) (2), 0) ';r =√rel2Pos‘* rel2Pos);accelmag = vs ^ 2 / r;unitvec = rel2Pos / r;accel = -accelmag * unitvec;T = 0.5; N = 1000;
计算轨迹
指定物体的加速度移动在一个圆圈x - y飞机。加速度是v ^ 2 / r向原点。
posmat = 0 (N);r1 = 0 (N);v = 0 (N);为n = 1: n (pos、韦尔oax] =平台(T, accel);posmat (:, n) = pos;vel2 =韦尔(1)^ 2 +韦尔(2)^ 2;v (n =√vel2);relPos = pos - originPos;relPos rel2Pos = [relPos (1) (2), 0) ';r =√rel2Pos‘* rel2Pos);r1 (n) = r;accelmag = vel2 / r;accelmag = vs ^ 2 / r; unitvec = rel2Pos/r; accel = -accelmag*unitvec;结束
显示最后一个局部坐标系的方向。
disp (oax)
-0.3658 -0.9307 -0.0001 0.9307 -0.3658 -0.0010 0.0009 -0.0005 1.0000
绘制轨迹和原点位置
posmat = posmat / 1000;图(1)plot3 (posmat (1:), posmat (2:), posmat (3:)“b”。)举行在plot3 (originPos (1) / 1000, originPos (2) / 1000, originPos (3) / 1000,“罗”)包含(“X(公里))ylabel (“Y”(公里))zlabel (“Z(公里)”)网格从
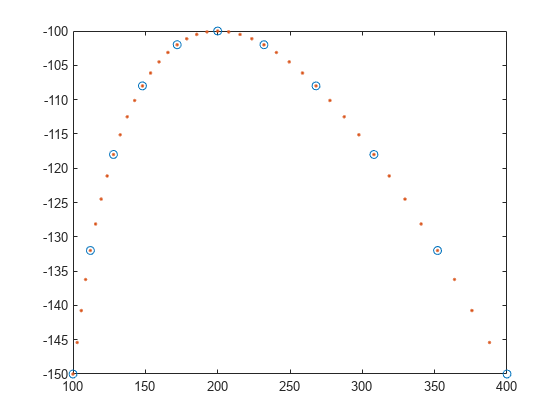
使用锚点定义平台运动
这个例子展示了
从抛物运动创建锚点。
x0 = 100;y0 = -150;z0 = 0;vx = 5;v = 10;vz = 0;ax = 1;唉= 1;t = [0:2:20];x = x0 + vx * t + ax / 2 * t ^ 2; y = y0 + vy*t + ay/2*t.^2; z = z0*ones(size(t)); wpts = [t.' x.' y.' z.'];
创建一个平台对象与运动决定使用锚点。
pltfm = phased.Platform (“MotionModel”,“自定义”,“CustomTrajectory”wpt);tstep = 5;nsteps = 40;X = [];
推进平台时间1/2秒的步骤,。
为k = 1: nsteps [pos,韦尔]= pltfm (tstep);X = [X; pos '];结束情节(x, y,“o”);持有在情节(X (: 1) X (:, 2),“。”)举行从;