local2globalcoord
Convert local to global coordinates
Syntax
描述
格库罗德= local2globalcoord(___,Imamiorigin)Imamiorigin。使用此语法与先前语法中的任何输入参数。
例子
Input Arguments
Output Arguments
More About
方位角和高度角度
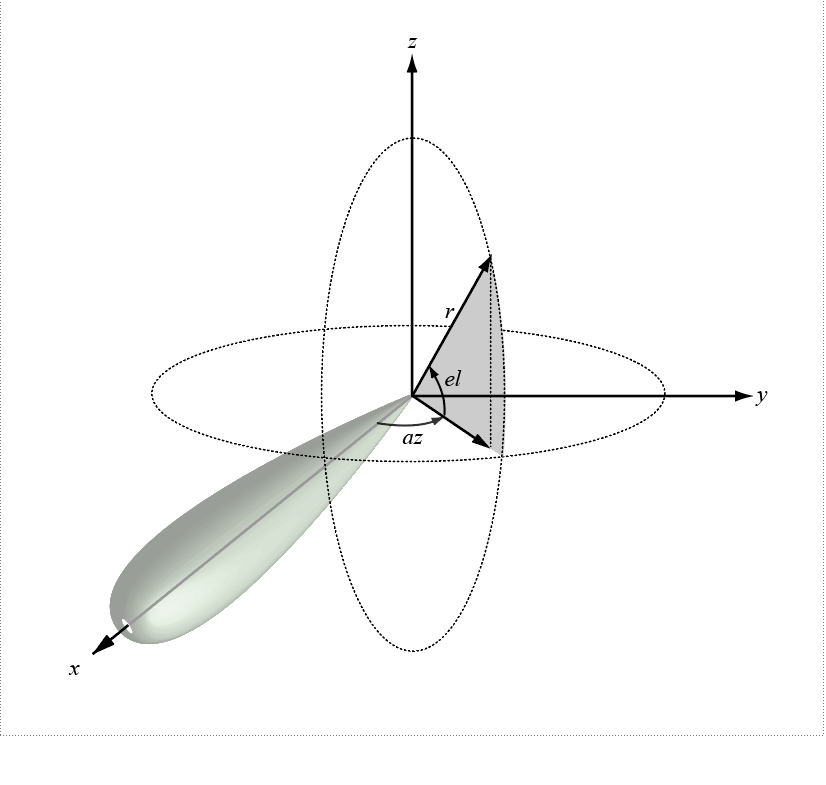
这方位角of a vector is the angle between thex-axis and the orthogonal projection of the vector onto thexy-飞机。这angle is positive from thex- 对这件事的兴趣y-轴。方位角在-180和180度之间。这仰角是个angle between the vector and its orthogonal projection onto thexy-飞机。角度为正向正向z-axis from thexy-飞机。缺省情况下,元素或数组的阻止方向与正面对齐x-轴。触控方向是元件或阵列的主叶的方向。
Note
仰角有时被定义为矢量使得阳性的角度z-轴。matlab.®和相控阵系统工具箱™products do not use this definition.
This figure illustrates the azimuth and elevation angles of a direction vector.
参考
[1] Foley,J. D.,A.Van Dam,S.K.Feiner和J. F. Hughes。Computer Graphics: Principles and Practice in C, 2nd Ed. Reading, MA: Addison-Wesley, 1995.
Extended Capabilities
Version History
您还可以从以下列表中选择一个网站: