主要内容
UV2azel.
将U / V坐标转换为方位角/高度角度
描述
例子
输入参数
输出参数
更多关于
PHI角度,θ角
角(φ)是阳性的角度y- 向载体的正交投影到轴上yz.飞机。角度朝向正面呈正Z.设在。PHI角度在0到360度之间。θ角度(θ)是来自的角度X-轴指向向量本身。这个角是正的yz.飞机。θ角度在0到180度之间。
该图说明了表现为绿色实线的载体的PHI和THEA。

φ/θ和θ之间的坐标变换阿兹/埃尔由以下等式描述
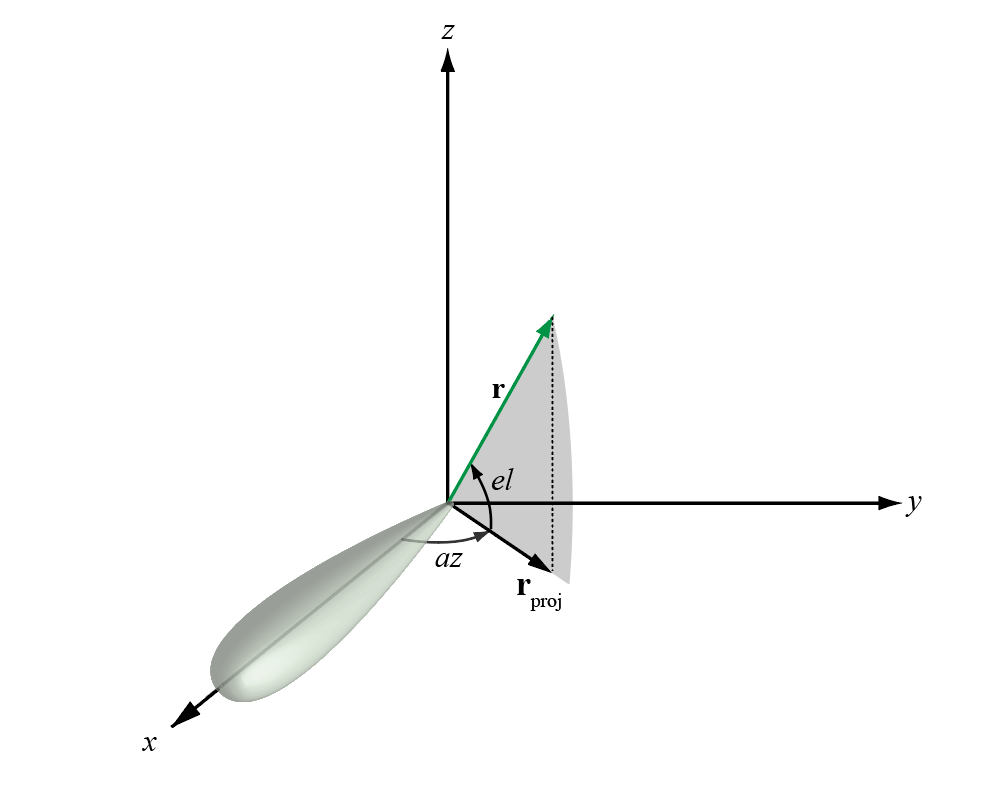
方位角,仰角
这方位角矢量是X- XIS和矢量的正交投影XY.飞机。从角度出发时是积极的X轴向朝向y轴。方位角介于-180度和180度之间。这仰角是矢量与其正交投影之间的角度XY.-飞机。在朝向积极时,角度是积极的Z.- 来自XISXY.飞机。默认情况下,元素或数组的轴向是正向对齐的X设在。触觉方向是元件或阵列的主叶的方向。
笔记
仰角有时在文献中定义为矢量使得阳性的角度Z.设在。MATLAB®并相控阵系统工具箱™产品不使用此定义。下载188bet金宝搏
这个图说明了矢量的方位角和仰角,用绿色实线表示。
扩展能力
在R2012A介绍
您还可以从以下列表中选择一个网站:
