液压轴流式泵,具有负载感应和压力限制控制
该示例示出了设计用于研究轴向活塞泵和典型控制单元之间的相互作用的测试钻机,同时执行负载感测和限压功能。为了确保所需的精度,泵的模型必须考虑活塞,旋转板和移位板之间的相互作用,这使得它使得有必要构建详细的泵模型。
模型
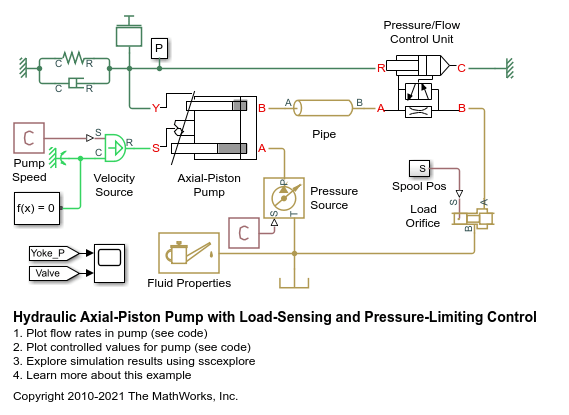
图1.测试钻机原理图
测试钻机描述
泵模型由名为轴向活塞泵的子系统表示。用理想的角速度源模拟旋转泵的主要动器。泵输出通过管道,控制单元和可作为负载的可变孔口。为了测试控制单元响应可变负载,孔口在仿真期间改变其区域。更改配置文件由信号构建器块实现。
测试装置中的控制单元由名为压力/流量控制单元的子系统表示。泵控制的负载感测功能使用固定孔口。无论泵加载如何,控制单元都会保持跨越该孔的压差。控制单元在流量控制阀之后测量的泵输出压力和负载压力上的信号。基于这些压力,该单元产生轭位移,从而影响泵中成角度的旋转斜盘的角度位置。这有助于在流量控制阀上保持指定的压差,并防止泵压超过预设值。
测试钻机基本参数:
泵最大位移7.8877E-6 M ^ 3 / rad俯仰半径0.04 m活塞区域1.77e-4 m ^ 2活塞5个最大活塞行程0.06 m旋转斜盘最大角度35°(0.6109 rad)臂长度致动器和旋转斜盘枢转点0.055 M旋转板致动器行程中风孔的底部在活塞室底部的孔口0.007 m泵最大额定速度260 rad / s(2482 rpm)最大压力270级额定流量1.1e-3 m ^3 / S.
所有基本参数都是通过的模型属性>回调>initfcn.选项。
轴向 - 活塞泵模型
正在研究的泵是一种带有五个活塞的轴向活塞泵。
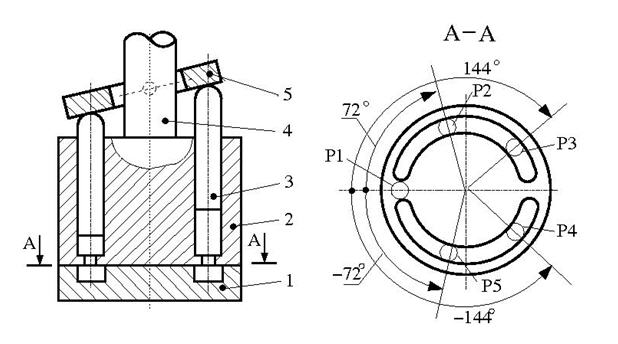
图2.轴向活塞泵原理图
泵示意图如图2所示,其中:
1 - 搬运板
2 - 缸体(转子)
3 - 活塞
4 - 驱动轴
5 - 旋转斜盘
泵模型的框图如图3所示。

图3.泵模型
泵的每个活塞由称为活塞的子系统代表。这些子系统是相同的,并连接到以下泵模型的外部端口:
S - 泵驱动轴
Y - 轭与斜坡机构的倾斜板连接
P - 泵放电
所有活塞(端口A)的吸入口连接到低压增压泵的输出,其用理想的液压源块模拟。增压泵的输出压力设定为5E5 PA。
轭连接到所有活塞的Y端口,从而作用于旋转旋转机构的成角度板。轭的位移受到硬盘的限制。
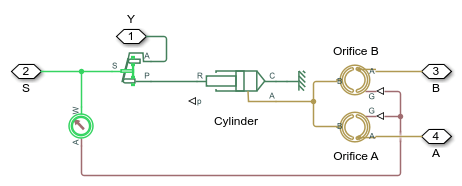
图4.活塞模型
活塞的模型(图4)基于单作用液压缸体,其通过旋转斜盘块机械地连接到驱动轴。圆筒也通过移入板可变孔口块液压地连接到端口A和B.端口A和B分别代表泵放电和进气口。
基于以下注意事项执行端口分配:
活塞均匀地沿着活塞缸的俯仰圆蔓延,如图2所示。这使得活塞360/5 = 72度之间的角度。
让我们假设第一活塞(示意图中的标记P1)精确地位于与最低活塞位置对应的参考点处。让我们进一步假设端口A代表泵的进气口。换句话说,活塞沿着槽A沿正方向(在这种情况下顺时针)上升,并且其腔室通过增压泵填充有流体。这意味着相位角活塞1中的移档板可变孔A的参数必须设置为零。活塞1中的移档板可变孔口B的相同参数必须设定为180度,因为它在旋转之后仅在旋转180度之后仅与槽B(泵出口端口)相互作用。
在活塞模型中,参数相位角每个移位板可变孔口块表示为相角A.和相角B., 分别。所有五个活塞的相位角的值在轴向 - 活塞泵子系统屏蔽编辑器的初始化部分中计算。下表显示了它们的值以度为单位,在括号中提供的弧度中的相应值:
----------------------------------------------------------------------------------活塞姓名在|相角A |相角B |泵模型中的相位角|||旋转斜盘块----------------------------------------------------------- Piston_1 |0 |180(PI)|0 piston_2 | 72 (1.2566) |-108 (-1.885) | 72 (1.2566) Piston_3 | 144 (5.5133) | -36 (-0.8029) | 144 (5.5133) Piston_4 |-144 (-5.5133) | 36 (0.8029) |-144 (-5.5133) Piston_5 | -72 (-1.2566) | 108 (1.885) | -72 (-1.2566) ---------------------------------------------------------------------
活塞模型中的旋转斜盘块也需要分配相位角,以指定活塞相对于倾斜表面的位置。利用所选参考点,旋转斜板相位角的值与相位角的值一致,如表所示。
移衬板可变孔口块需要各自的活塞处的角位置。该功能由角度传感器块执行。
其他重要参数是气缸的行程和活塞相对于汽缸盖的初始位置。行程必须足够大,以允许活塞甚至在旋转斜盘的最大角度处往复运动
中风> 2 *Pitchradius.*晒黑(格光乐),
在哪里Pitchradius.汽缸块间距圆的半径,和格光乐是旋转斜盘的最大允许角度。
在该模型中,最大角度设定为35度(0.6109 rad),间距半径设定为0.04米,这使得行程大于0.056米。行程设定为0.06米。活塞初始位置必须等于冲程的一半以零初始旋转斜盘角度。但是,初始角度根据执行器的初始位置而改变其值。结果,使用等式计算活塞初始位置

在子系统掩码编辑器的初始化部分中执行活塞初始位置的计算。
压力/流量控制单元
控制单元的目的是实现两个功能:负载敏感和压力限制。负载敏感是通过保持流量控制阀的指定压差来实现的。在试验台模型(图1)中,流量控制阀采用可变面积槽块孔板进行模拟。阀门上游和下游的压力通过端口P和LSP传送到压力/流量控制单元(图5)。

图5.压力/流量控制单元原理图
这些压力作用在三通方向阀的侧面上,并将阀门成比例地移动到居中弹簧的压力差和设置。以这样的方式选择阀连接,使得增加的压差打开路径A-P并关闭路径A-T。致动器被布置为单杆差动液压缸,其杆连接到泵轭。如果杆在示意图所示的箭头的方向上移动,则泵位移增加。由于气缸有效区域之间的差异,如果两个汽缸腔室连接到泵,则置换增加,并且如果没有杆的腔室连接到罐,则减小。结果,随着泵的增加,阀门的压差增加到降低其位移,直到它返回预设值。阀门的弹簧预载是用等式确定的
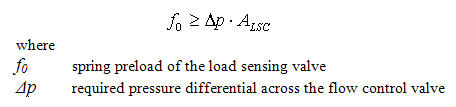
压力限制功能的目的是防止泵压超过预设值。它用压力消除阀和LSP线中的孔口实现。压力释放阀设定为所需的最大值。当泵压达到该值时,阀门打开并导致阀的右腔室中的压力降低开口路径A-P。执行器向右移动,直到压力返回到预设值。
负载感测阀的模型采用三通方向阀,液压双作用阀致动器,压力 - 浮雕阀和固定孔口块构成,如模型图所示(图6和7)所示。

图6.压力/流量控制单元模型
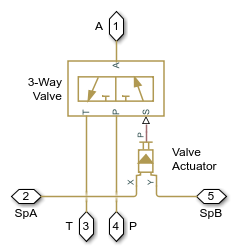
图7. 3路阀压控模型
压差设定为20巴。3路方向阀路径A-T必须最初打开,以迫使泵在操作开始时增加其位移。为了执行负载感测功能,B端口(负载传感端口)的压力增加必须打开A-T路径并关闭A-P路径。这些是确定阀门端口连接到系统的原因。在模型中调整剩余的负载感测控制阀参数,例如弹簧刚度,阀门行程,阀门孔口区域等,以确保所需的精度,稳定性和数值效率。
压力限制功能用固定孔口和减压阀块的组合来实现。阀门设定为250巴。在这种压力下,通过固定孔口的流量增加,导致液压双作用阀致动器(图7中的块阀致动器的端口Y处的压力下降,最终降低泵的位移。
循环描述
模拟循环由具有不同负载条件的六个元件组成,其中可变区域插槽块。
该循环从零开口信号开始,然后开口为2.8,5.2,1,-0.8,最后,2.45 mm。在循环开始时,泵轴在260 rad / s(〜2500rpm)上旋转,泵轭初始位置设置为5 mm。伺服缸开始增加泵位移,泵压力缓慢积聚,并且在流量控制阀上的压差后,该过程在〜0.35秒落下,变得靠近预设20巴。载荷传感阀此时将〜1.2毫米打开。
在循环的接下来的三个部分期间,尽管载荷阀开口变化,泵实际上保持了相同的交付。
在1s时,负载阀实际上是完全关闭的,导致泵的压力上升。当压力达到270bar时,负载限制功能就占主导地位。当压力低于预设值时,泵返回负载敏感模式。
Simscape Logging的仿真结果
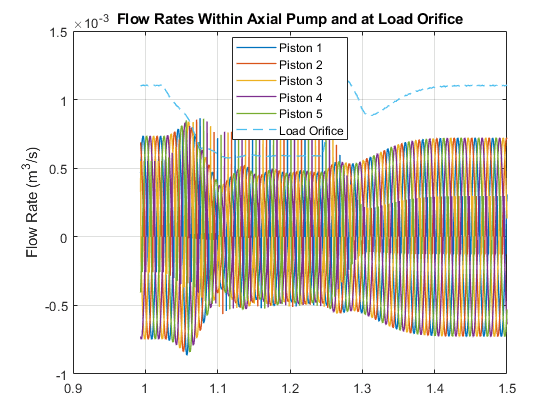
下图显示了泵活塞和负载内的流量。可以看到活塞压力的循环性质,以及泵的总体行为保持靠近其额定流速。
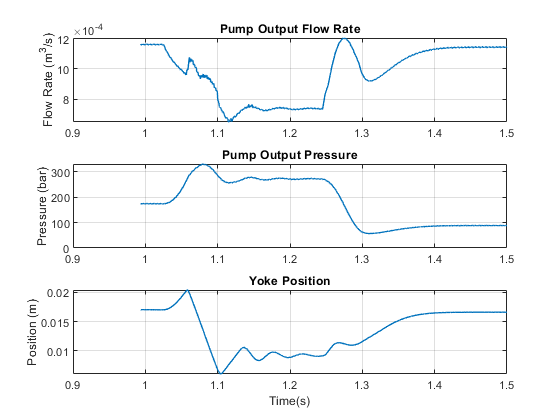
该图显示了负载感测和压力限制控制。即使负载变化,泵也使其额定流量为1.1 m ^ 3 / s,如泵输出压力图所示。然而,随着泵输出压力升高到其最大额定压力,压力限制控制调节轭位置,流速下降低于其额定流速。
您还可以从以下列表中选择一个网站: