线性化一个用于反馈控制设计的工厂模型
这个例子展示了如何线性化一个液压装置模型来支持控制系统的稳定性分析和设计。金宝app
根据可用的软件,使用本示例的适当部分来探索各种线性化和分析技术。
探索模型
以开启液压作动器与数字位置控制器的实例模型,类型ssc_hydraulic_actuator_digital_control在MATLAB®命令窗口。

该模型代表了一个在闭环回路中作用的双向阀和一个双作用气缸。双击液压执行器子系统查看模型配置。

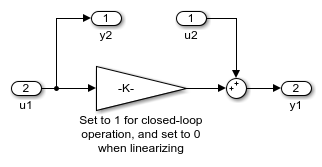
该控制器表示为连续时间传递函数加上传输延迟,允许计算时间和零阶保持,当实现在离散时间。线性化I/O点子系统可以让您轻松地打破和恢复反馈控制回路,通过设置基本工作空间变量闭环分别为0或1。
通过单击,可以快速生成和查看小信号频率响应线性化模型注释中的超链接。要查看生成频率响应的MATLAB脚本,请单击该注释中的下一个超链接,看代码.本文档提供了背景信息和基于现有软件的线性化方法。
通常,要获得一个非平凡的线性化输入-输出模型并生成频率响应,您必须指定模型级的输入和输出。带有数字位置控制器模型的液压执行器通过两种方式满足这一要求,这取决于你如何线性化:
金宝app®需要顶级或模型级的输入和输出端口进行线性化
linmod.该型号有这样的港口,标记三机一体和着干活.金宝app仿真软件控制设计™软件要求您指定具有线性化点的输入和输出信号线。指定的线路必须是Simulink信号线,而不是Simsc金宝appape™物理连接线。该模型具有指定的线性化点。,以获取更多使用信息金宝app仿真软件控制设计用于修剪和线性化的软件,请参阅文档产品.
打开Load Position范围并在一个正常的闭环控制器配置中模拟模型。

你可以看到,当双向阀打开时,模型在2到3秒之间有准线性稳态响应。因此,2.5秒的状态是一个适合线性化的工作点。
使用控制器修剪和线性化金宝applinmod函数
设置控制器参数。
要指定控制器离散时间实现的采样时间,请在MATLAB命令窗口中输入以下命令:
t = 0.001;
指定连续时间控制器分子和分母,类型:
num = -0.5;Den = [1e-3 1];
通过运行闭环找到工作点,选择自定义二通阀开启时的2.5秒状态。
要关闭反馈回路,输入:
assignin(‘基地’,‘闭环’,1);
对模型进行仿真,并以状态向量的形式保存工作点信息X和输入向量U类型:
(t, x, y) = sim(“ssc_hydraulic_actuator_digital_control”);idx =找到(t > 2.5, 1);X = X (idx:);U = y (idx);
使用Simulink将模型线性化金宝app
linmod函数。要打破反馈循环,输入:
assignin(“基地”、“闭环”,0);
要将模型线性化,请输入:
[a, b, c, d] = linmod (ssc_hydraulic_actuator_digital_control, X, U);
关闭反馈循环输入:
assignin(‘基地’,‘闭环’,1);
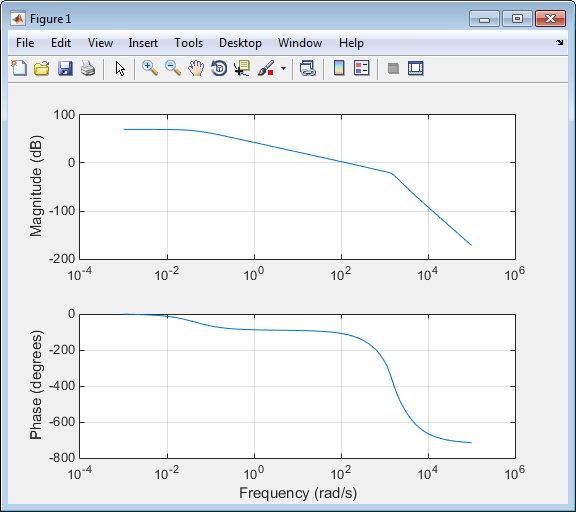
要生成带有负反馈约定的波德图,请在MATLAB命令窗口中输入以下命令:
c = c;d = - d;《不扩散核武器条约》= 100;w = logspace(3、5、《不扩散核武器条约》);G = 0(1、《不扩散核武器条约》);G i = 1:《不扩散核武器条约》(i) = c *我* w (i) *(1眼(大小(a))——)^ 1 * b + d;子图(212),半对数x(w,180/pi*unwrap(角(G))) ylabel(相位(度数))xlabel(频率(rad/s))网格
线性化的金宝app控制设计软件
请注意
要完成这部分,你必须有一个金宝app仿真软件控制设计许可证。
金宝app仿真软件控制设计软件具有帮助您找到操作点并返回定义状态名称的状态空间模型对象的工具。这是对Simscape模型进行线性化的推荐方法。
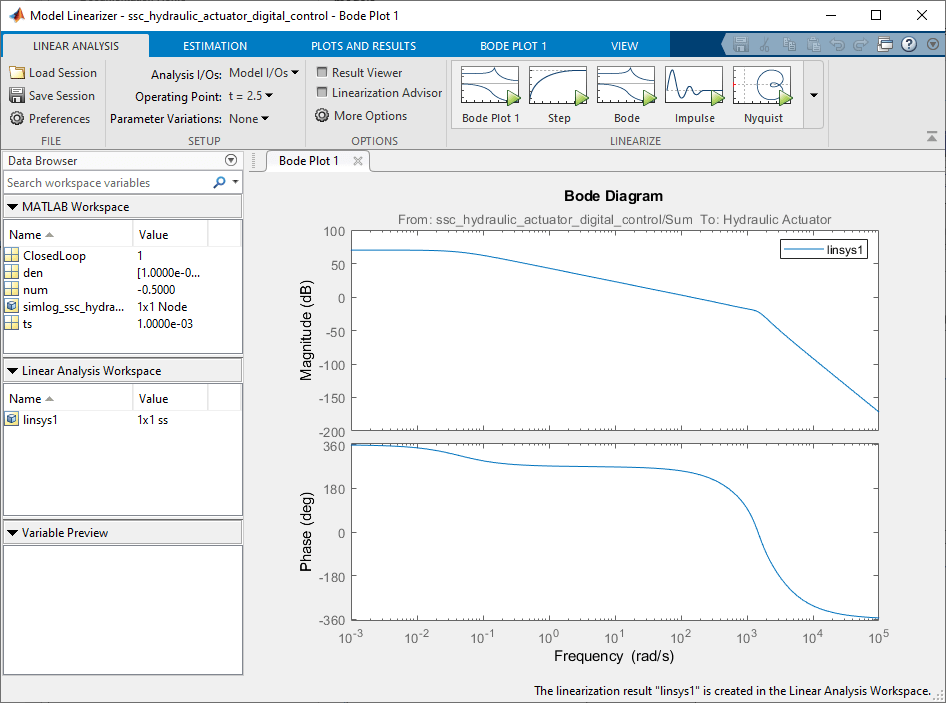
在Simuli金宝appnk工具条中对液压作动器的数字位置控制器模型窗口进行了研究应用程序选项卡,在控制系统,点击模型线性化电路.
在模型线性化窗口中,在线性分析选项卡,操作点下拉列表中,选择
线性化的.输入仿真快照时间2.5秒,然后单击好吧.单击波德情节按钮。
,以获取更多使用信息金宝app仿真软件控制设计软件的修剪和线性化,见金宝app仿真软件控制设计文档.
相关的例子
更多关于
你也可以从以下列表中选择一个网站: