主要内容
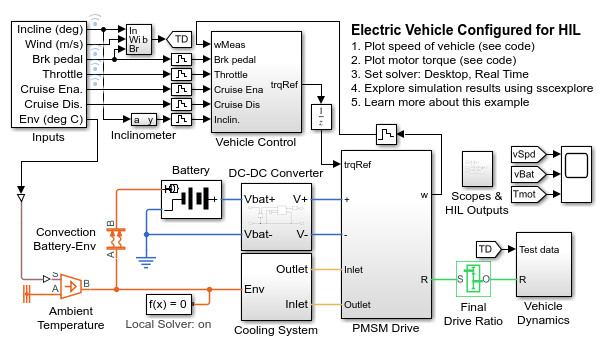
电动汽车配置为HIL
这个例子展示了一个适用于硬件在环(HIL)部署的电动汽车模型。基于能量的建模避免了高频切换,求解器设置为固定步长仿真。
测试显示,汽车在一个斜坡上加速到一个稳定的速度,然后下降一段时间,在此期间电能被返回到电池。
模型
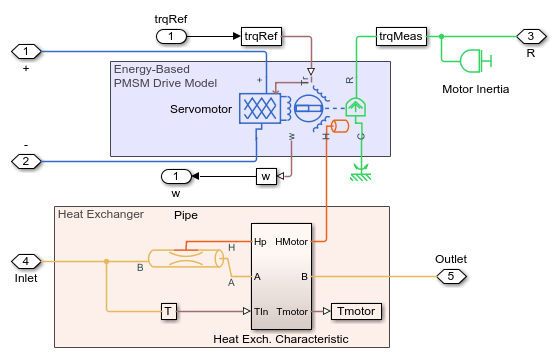
永磁同步电动机驱动子系统
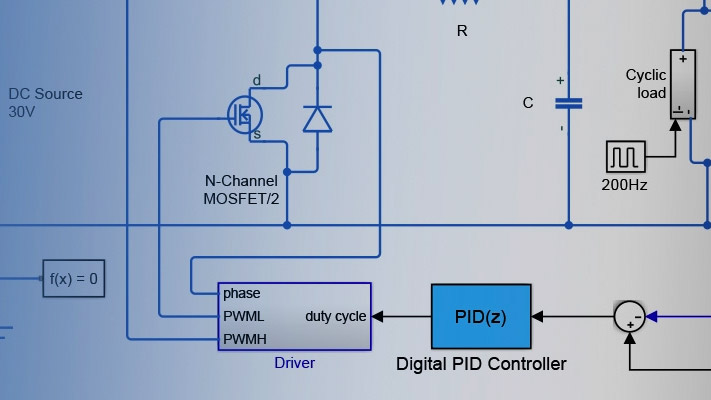
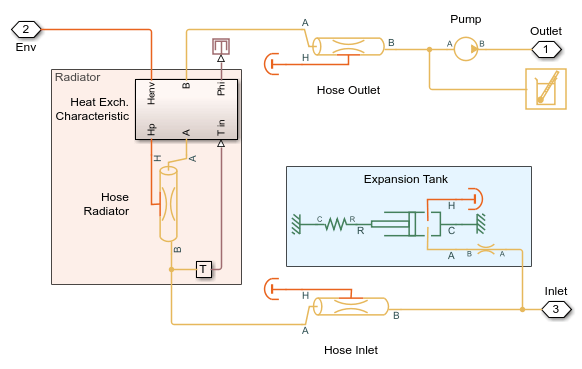
冷却系统子系统
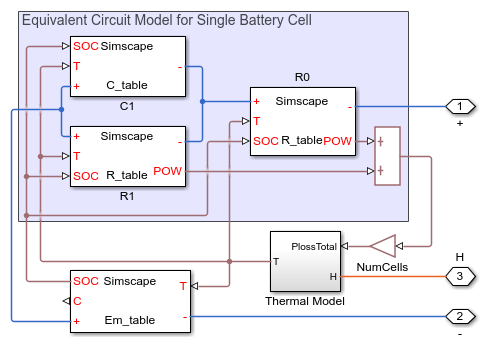
电热模型子系统
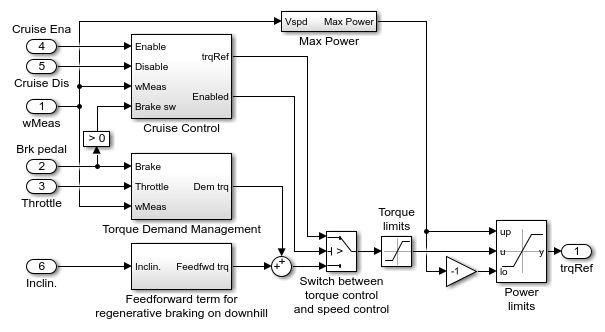
车辆控制子系统
Simscape日志的仿真结果
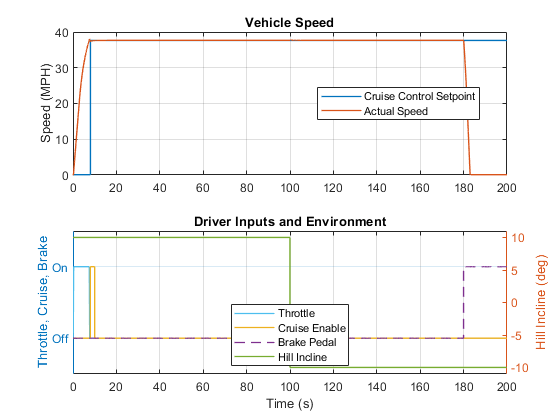
下图显示了电动汽车在驾驶员输入和环境条件下的行为。车辆加速,直到司机启用巡航控制。即使道路坡度改变,车辆也能保持速度。当司机踩刹车时,车辆减速至零速度。
下图显示了电动汽车中PMSM电机产生的转矩及其温度。在模拟的前半部分,电机将车辆加速到规定的速度,然后继续施加扭矩,推动车辆上山。在仿真的后半部分,电机作为发电机,从电机转矩符号的变化可以看出。

你也可以从以下列表中选择一个网站: