文档帮助中心文档
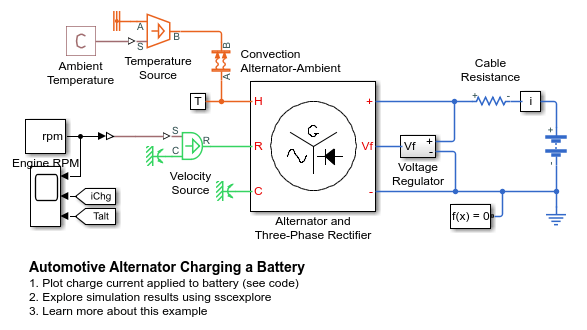
如何将交流发电机的行为抽象为一个有效仿真的直流模型。这个测试线束首先上升交流发电机的速度线性从零到典型的怠速900 RPM。当产生的电压足以克服与整流二极管相关的正向电压降时,电池充电电流开始上升。然后测试线束的速度提高到5000转/分钟,交流发电机必须后退磁场电压,以维持调节电压。该模型捕捉到发电机发热时定子电阻的增加,这降低了设备的性能
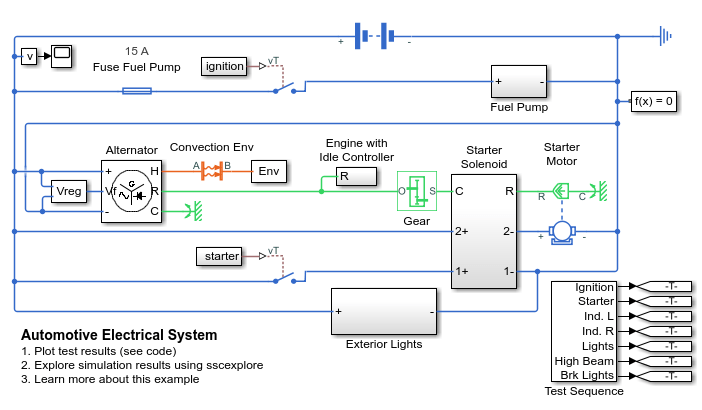
汽车电气系统的简化动力学模型。该模型包含电气、机械和热力系统,能够模拟发动机启动对电网的影响。
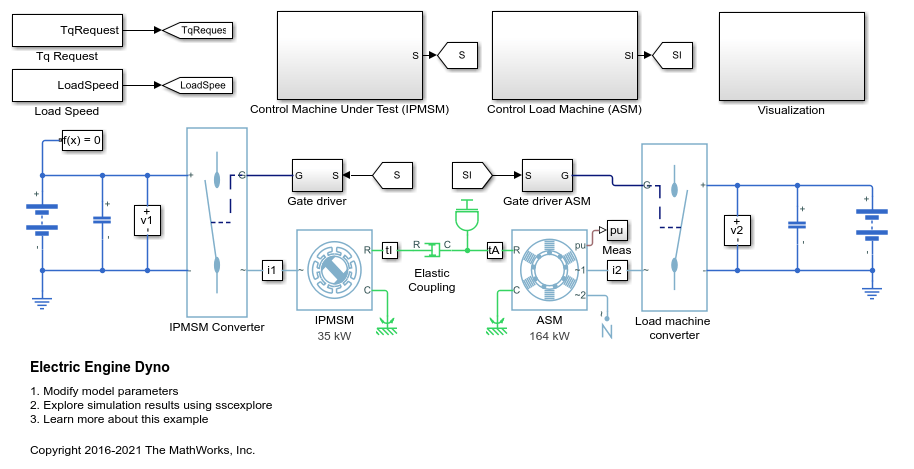
模型电动车辆测功机试验。测试环境包含异步机器(ASM)和内部永磁同步机(IPMSM)通过机械轴连接回来。两台机器通过高压电池通过受控的三相转换器供给。164 kW ASM产生负载扭矩。35千瓦IPMSM是正在测试的电机。DEST的控制机(IPMSM)子系统控制IPMSM的扭矩。该控制器采用基于多速率pi的控制结构。开环转矩控制的速度比闭环电流控制的速度慢。控制器的任务调度被实现为statflow®状态机。控制负载机(ASM)子系统使用单个速率来控制ASM的速度。 The Visualization subsystem contains scopes that allow you to see the simulation results.
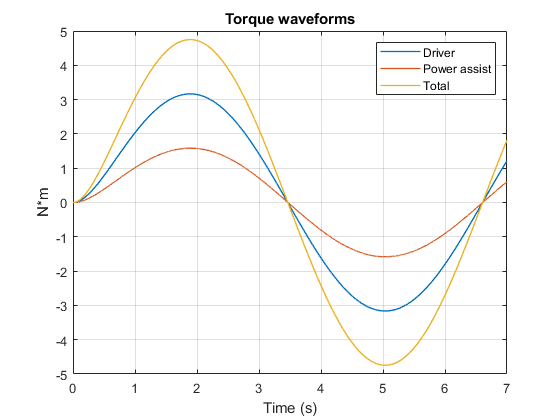
使用永磁同步电机(PMSM)放大助力辅助汽车转向系统中的驱动器施加的力。
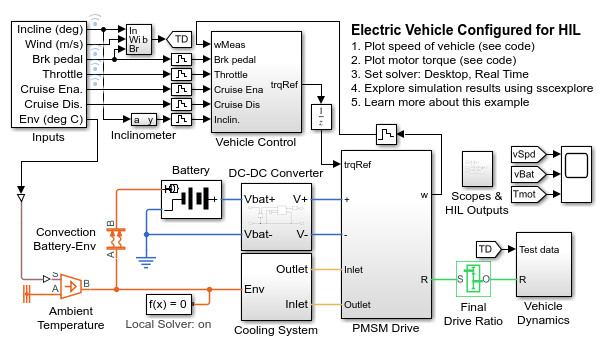
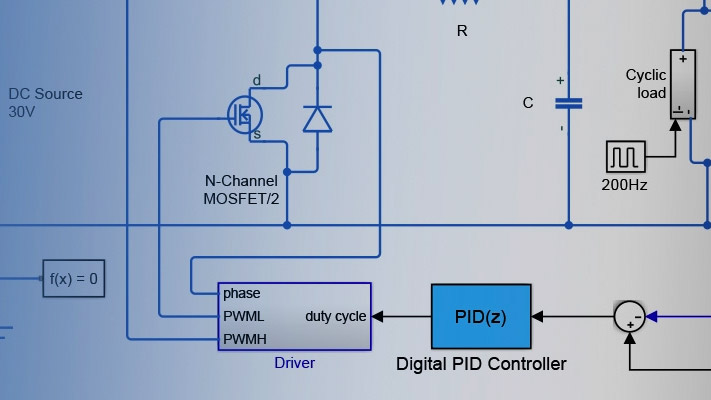
适用于循环(HIL)部署的电动车型。基于能量的建模用于避免高频开关,并为固定阶梯仿真设定的求解器。
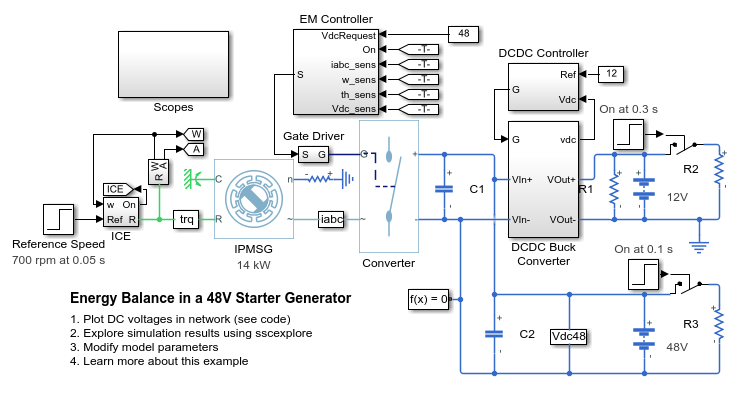
内部永磁同步机(IPMSM)用作简化的48V汽车系统中的起动器/发电机。该系统包含48V电网和12V电网。内燃机(ICE)由基本机械块表示。IPMSM作为电机运行,直到冰达到空闲速度,然后它作为发电机运行。IPMSM为48V网络提供电源,其中包含R3功耗。48V网络为12V网络提供电源,具有两个消费者:R1和R2。总模拟时间(t)为0.5秒。在T = 0.05秒时,冰开启。在T = 0.1秒时,R3开关。在T = 0.3秒时,R2接通并增加12V电网上的负载。 The EM Controller subsystem includes a multi-rate PI-based cascade control structure which has an outer voltage-control loop and two inner current-control loops. The task scheduling in the Control subsystem is implemented as a Stateflow® state machine. The DCDC Controller subsystem implements a simple PI controller for the DC-DC Buck converter, which feeds the 12V network. The Scopes subsystem contains scopes that allow you to see the simulation results.
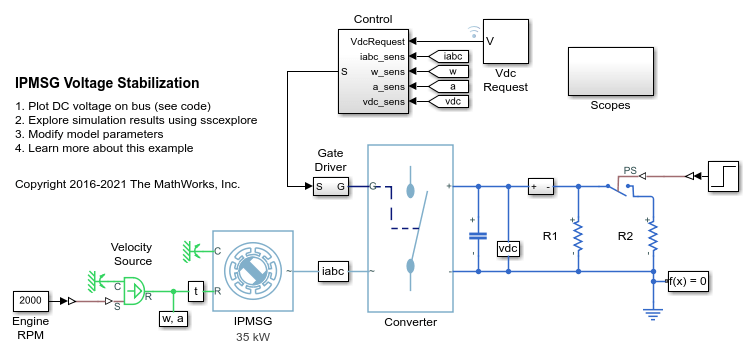
基于内置永磁同步发电机(IPMSG)的混合动力汽车低压发电系统的控制。控制子系统包括一个基于pi的多速率级联控制结构,该结构具有一个外部电压控制环和两个内部电流控制环。Control子系统中的任务调度是作为statflow®状态机实现的。scope子系统包含允许您查看模拟结果的作用域。一个理想的角速度源,代表一个内燃机,驱动IPMSG。IPMSG为负载R1和R2提供低压电源。在t = 0.4秒时,开关闭合,负载增加。
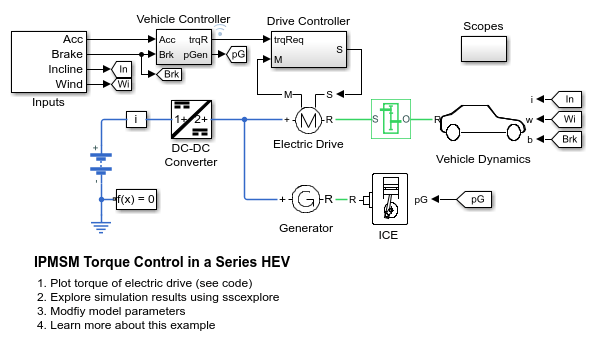
内置永磁同步电机(IPMSM)推动简化串联混合动力汽车(HEV)。一个理想的DCDC变换器,连接到高压电池,通过一个受控的三相变换器给IPMSM供电。由内燃机驱动的发电机给高压电池充电。车辆传动和差速器采用固定比齿轮减速模型。车辆控制器子系统将驾驶员输入转换为IPMSM和发电机的相关命令。驱动控制器子系统控制IPMSM的转矩。该控制器采用基于多速率pi的控制结构。开环转矩控制的速度比闭环电流控制的速度慢。控制器的任务调度被实现为statflow®状态机。范围子系统包含允许您查看模拟结果的范围。
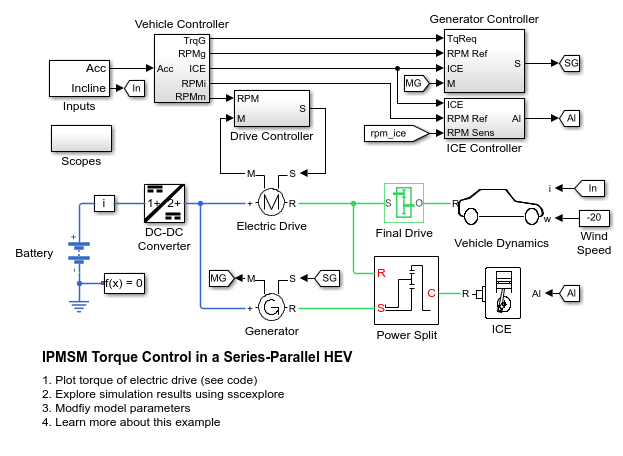
简化的串联平行混合动力电动车(HEV)。一个内置永磁同步电机(IPMSM)和一个内燃机(ICE)提供车辆推进。冰也使用发电机在驾驶期间重新充电高压电池。车辆传动和差速器采用固定比齿轮减速模型。车辆控制器子系统将驾驶员输入转换为扭矩命令。车辆控制策略被实现为statflow®状态机。ICE Controller子系统控制内燃机的扭矩。发电机控制器子系统控制发电机的扭矩。驱动控制器子系统控制IPMSM的转矩。范围子系统包含允许您查看模拟结果的范围。
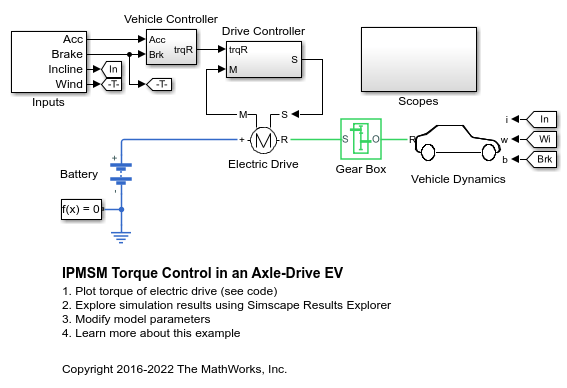
内置永磁同步电机(IPMSM)推动简化的轴驱动电动汽车。高压电池通过一个可控的三相变换器给IPMSM供电。IPMSM可以在驱动和发电两种模式下运行。车辆传动和差速器采用固定比齿轮减速模型。车辆控制器子系统将驾驶员输入转换为相关的扭矩命令。驱动控制器子系统控制IPMSM的转矩。该控制器采用基于多速率pi的控制结构。开环转矩控制的速度比闭环电流控制的速度慢。控制器的任务调度被实现为statflow®状态机。范围子系统包含允许您查看模拟结果的范围。
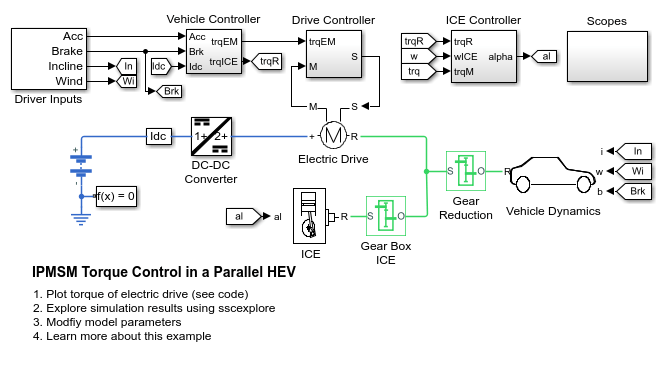
一种简化的并联混合动力汽车。一个内置永磁同步电机(IPMSM)和一个内燃机(ICE)提供车辆推进。IPMSM可以在驱动和发电两种模式下运行。车辆传动和差速器采用固定比齿轮减速模型。车辆控制器子系统将驾驶员输入转换为扭矩命令。车辆控制策略被实现为statflow®状态机。ICE Controller子系统控制内燃机的扭矩。驱动控制器子系统控制IPMSM的转矩。范围子系统包含允许您查看模拟结果的范围。
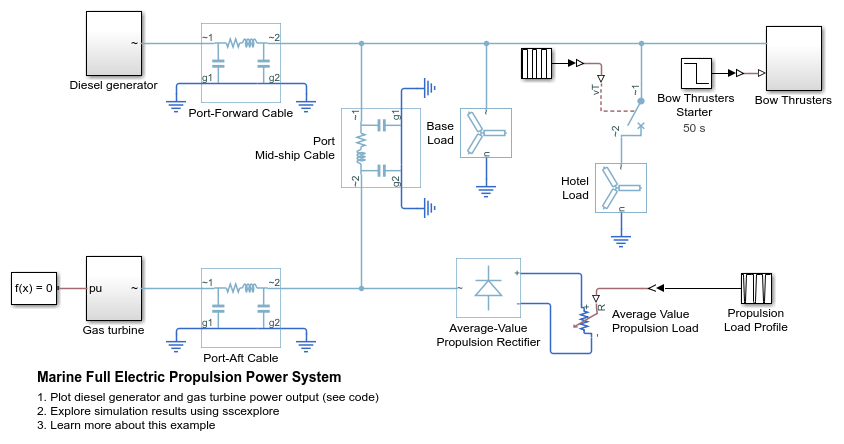
具有基础负荷,酒店负荷,弓箭和电动推进器的代表性海洋半船电力系统。
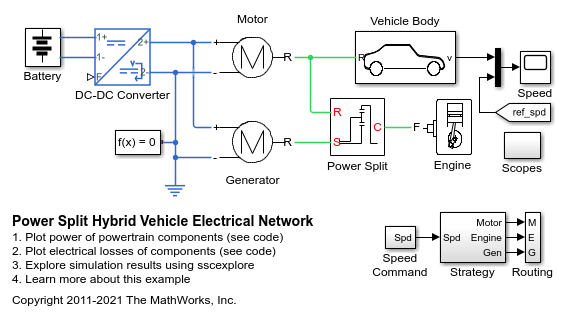
电力分流混合传输的基本架构。行星齿轮以及电动机和发电机,类似于可变比齿轮。在该测试中,车辆从15m / s加速至20m / s,然后减速回15m / s。电源管理策略仅使用电力来执行操纵。
你点击一个链接对应于这个MATLAB命令:
通过在MATLAB命令窗口中输入命令来运行命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:。
你也可以从以下列表中选择一个网站:
选择中国网站(以中文或英文)以获取最佳网站性能。其他MathWorks国家网站未优化您的位置。
联系您当地的办公室