文档帮助中心文档
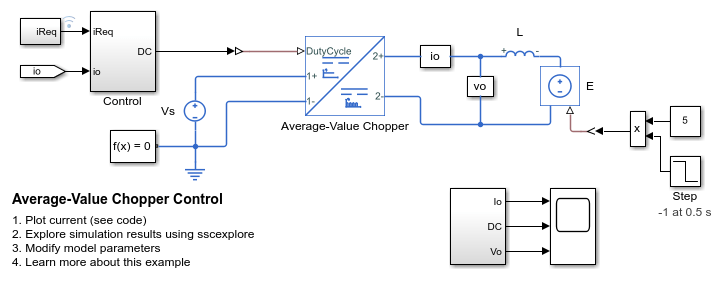
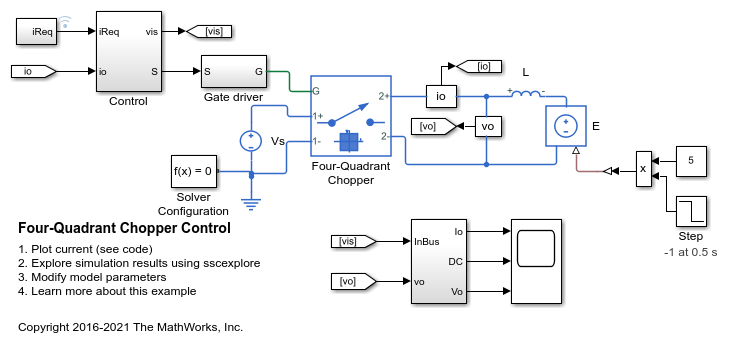
控制四象限直升机。控制子系统实现了一个简单的基于pi的控制算法来控制输出电流。采用平均值斩波器模型加速仿真。模拟使用了正面和负面的参考。总仿真时间(t)为1 s。在t = 0.5 s时,负载直流源E的极性发生变化。
控制降压 - 升压转换器的输出电压。为了调整占空比,控制子系统采用基于pi的控制算法。平均值DC-DC转换器模型用于加速模拟。在整个仿真中,输入电压和系统负载保持恒定。总模拟时间(t)为0.25秒。在T = 0.15秒,电压参考变化和系统从降压模式切换到升压模式。
控制升压变换器的输出电压。为了调整占空比,控制子系统采用基于pi的控制算法。在整个仿真过程中,输入电压被认为是恒定的。可变电阻为系统提供负载。总的模拟时间(t)为0.25秒。在t = 0.15秒时,负载变化。
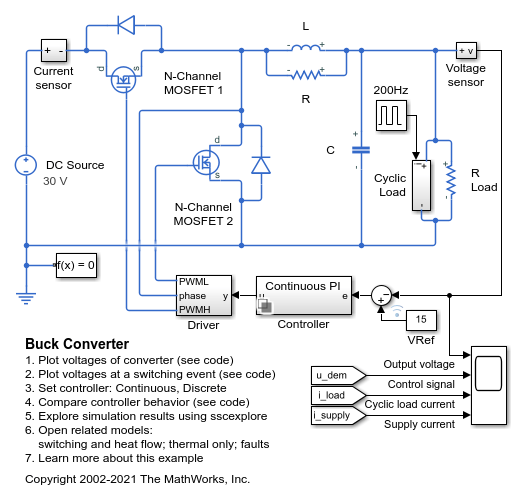
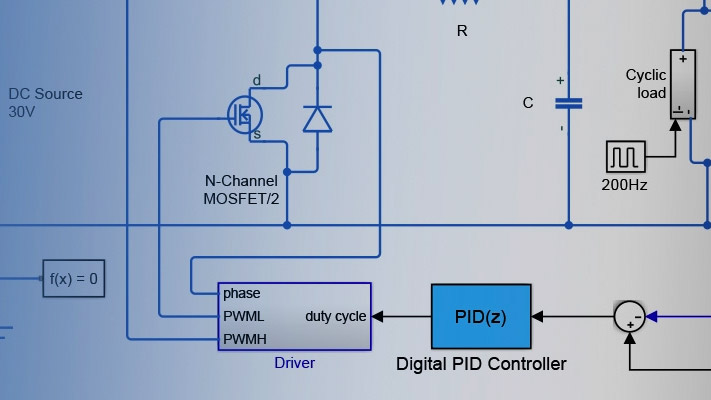
模型一种开关电源,将30V直流电源转换为稳压15V直流电源。该模型可用于电感L的大小、平滑电容C的大小以及反馈控制器的设计。通过选择连续和离散控制器之间,可以探索离散化的影响。
使用多项式RST控制器控制降压转换器的输出电压。RST控制器调整占空比。在整个仿真过程中,输入电压被认为是恒定的。可变电阻为系统提供负载。总的模拟时间(t)为0.25秒。在T = 0.15秒时,负载改变。在T = 0.2秒时,电压基准从6V变为4V。
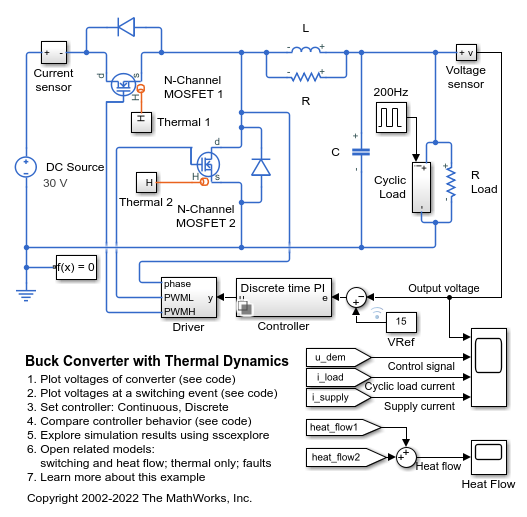
建立了同步降压变换器中mosfet的热动力学模型。它符合同步降压变换器的结构与热动力学模型(>> ee_switching_power_supply_thermal)。省略了电开关动力学允许模拟采取更大的时间步长,极大地减少了模拟计算mosfet稳态温度所需的时间。
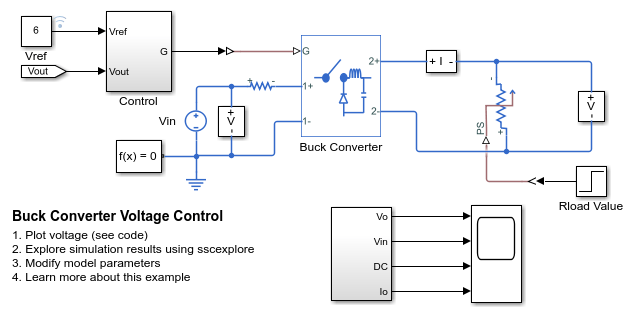
控制降压转换器的输出电压。为了调整占空比,控制子系统采用基于pi的控制算法。在整个仿真过程中,输入电压被认为是恒定的。可变电阻为系统提供负载。总的模拟时间(t)为0.25秒。在t = 0.15秒时,负载变化。
模型并评估组件公差和故障事件对开关电源操作的影响。R,L和C组件都具有公差,操作限制和故障定义。可以在块对话框中或使用MATLAB®命令启用故障。电容器故障已启用以在1.5E-3秒内切割。
模型一种开关电源,将30V直流电源转换为稳压15V直流电源。该模型可用于电感L的大小、平滑电容C的大小以及反馈控制器的设计。通过选择连续和离散控制器之间,可以探索离散化的影响。将开关设备建模为MOSFET而不是理想的开关,确保设备在电阻上正确表示。该模型还捕获了器件的开启/关闭定时,这主要取决于栅极电容值和PWM驱动器输出电阻。
具有频率控制的E类电源转换器。在控制器块中的Simulink®在Simulink®中实现了一个简单的整体控制,旨在将1金宝app00W传送到5OHM负载中。开关是LDMOS,具有非线性电容模型的高压晶体管,R反式是变压器的等效串联电阻。输出范围显示用于评估开关上的电压应力的漏极源电压。注意,由于晶体管的非线性输出电容,如果输出电容恒定,则峰值电压应力高于预期。另外,范围还示出了输出电压的频率控制信号,输出电压和参考值。该模型可用于计算电路中的组件的输出功率信息。
一种降压转换器,用于测量源上的共模和差模噪声。为了模拟共模噪声,模型中必须包含电路与参考平面之间的电容耦合。在这个电路中,开关节点(高端和低端晶体管之间)和参考平面之间的电容也包括在内。
一种频率控制的DC-DC LLC电源转换器。在控制器模块中的Simulink®中实现了一个简单的积分控制,旨在实现由变量Vout_n金宝appominal定义的额定输出电压。输出范围显示频率控制信号,输出电压和输出电压的参考值。在启动过程中,参考值被提升到所需的设定值。采用一阶谐波近似法自动计算LLC动力系统的设计。
控制双象限的斩波器。双象限斩波器在第一和第四象限中操作,允许正和负输出电压。控制子系统实现了一个简单的基于pi的控制算法来控制输出电流。总模拟时间(t)为0.5秒。在T = 0.25秒时,加载直流源E的极性被改变。
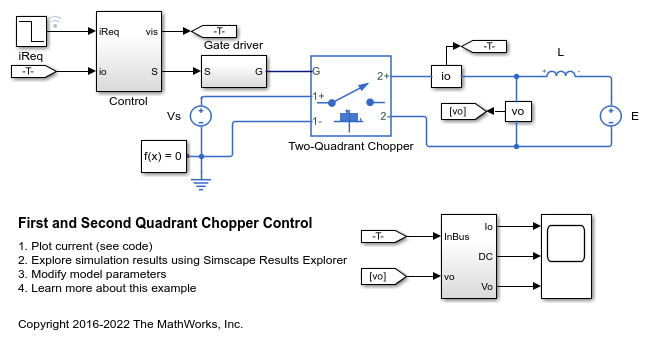
控制双象限的斩波器。双象限斩波器在第一和第二象限中操作,允许正负输出电流。控制子系统实现了一个简单的基于pi的控制算法来控制输出电流。在整个模拟中,系统的负载被认为是恒定的。
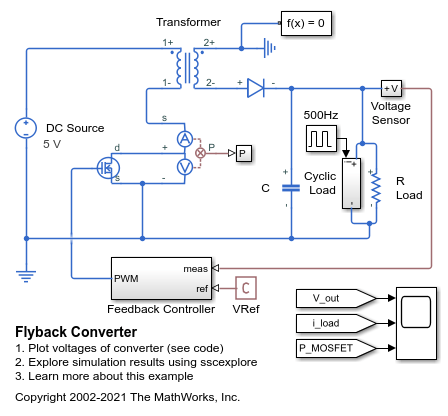
反激变换器如何将5V直流电源升压到15V直流稳压电源。通过在一次变压器上产生一个时变电压来增加电压。变压器升高电压,然后由二极管整流回直流电。对输出电压的闭环控制是通过控制一次侧的开关频率来实现的。
控制四象限直升机。控制子系统实现了一个简单的基于pi的控制算法来控制输出电流。模拟使用了正面和负面的参考。总模拟时间(t)为1秒钟。在T = 0.5秒时,改变负载直流源E的极性。
控制四开关降压转换器的输出电压。为了调整占空比,控制子系统采用基于pi的控制算法。在升压和降压模式中,一个开关控制占空比,一个是逆时运行的,另外两个保持在固定位置。在整个仿真中,输入电压和系统负载被认为是恒定的。总的模拟时间(t)为0.25秒。在T = 0.15秒,电压参考变化和系统从降压模式切换到升压模式。
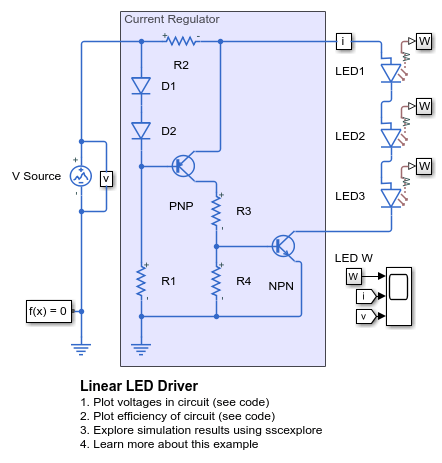
一种基于线性电流调节器的LED驱动器。示波器显示光、电流输出和电源电压。当电源电压大于大约12V时,输出进入调节状态。
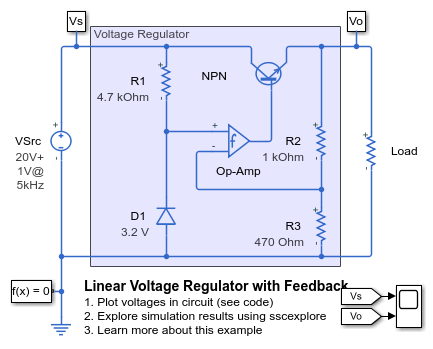
由离散组件构造的简单稳压电路。波动的电源被建模为20V DC加上1V正弦变形。齐纳二极管D1将OP-AMP的非反相输入设置为3.2V,因此由于OP-AMP具有大的增益,因此OP-AMP反相输入和输出也在3.2V。因此,调节器电压输出被调节为3.2 *(1000 + 470)/ 470 = 10V。需要NPN双极晶体管以提供比典型的OP-AMP可以的更高电流。该模型可用于检查电路操作,并支持选择组件以实现所需的电压调节。金宝app
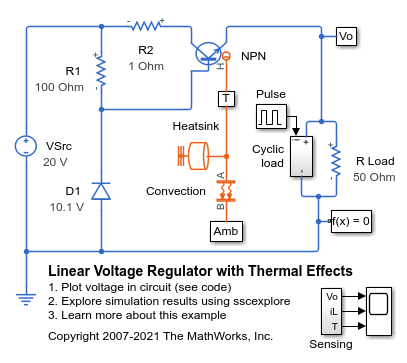
一种低成本的电压调整电路,其性能取决于负载电流和温度。偏置电阻R1确保晶体管基极的电压接近额定齐纳电压。稳压器的输出电压也大约是这个电压,基极-发射极电压为零点几伏特。精确的基极-发射极电压取决于晶体管的工作点(这又取决于负载)和温度。电阻R2仅在瞬态输出短路的情况下提供一些保护。
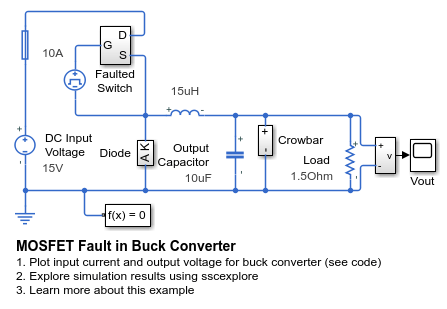
如何将故障应用于功率变换器中的MOSFET,以探索保护电路的运行。在MOSFET故障后,撬棍电路被激活,以钳住负载的输出电压,最终导致熔断器爆炸。
控制一架1象限直升机。控制子系统实现了一个简单的基于pi的控制算法来控制输出电流。
控制推挽降压变换器的输出电压。通过电感的电流永不为零,因此DC-DC变换器工作在连续导通模式(CCM)。为了转换和保持额定输出电压,PI控制器子系统使用了一个简单的积分控制。在启动过程中,参考电压被提升到所需的输出电压。
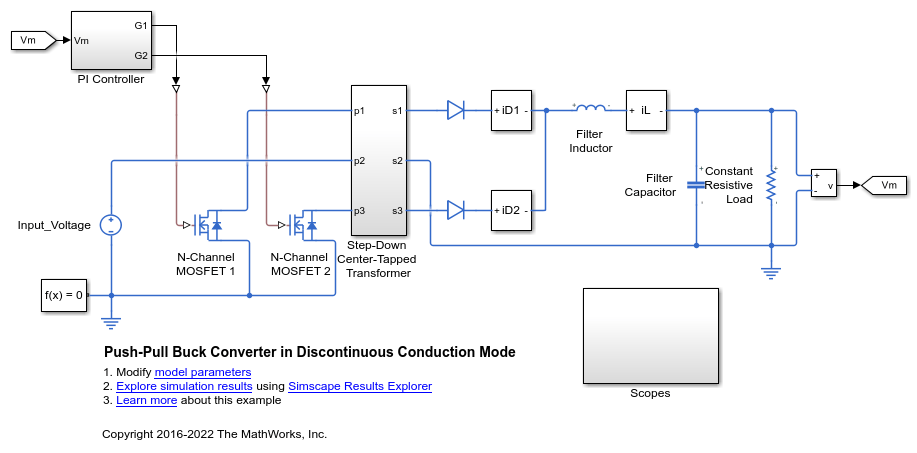
控制推挽降压变换器的输出电压。流过电感器的电流在MOSFET的关闭循环期间达到零,因此DC-DC转换器以不连续的传导模式(DCM)操作。这种传导方式主要用于低功耗应用。要将输入直流电压转换为标称输出电压,PI控制器子系统使用简单的积分控制。在启动过程中,参考电压被提升到所需的输出电压。
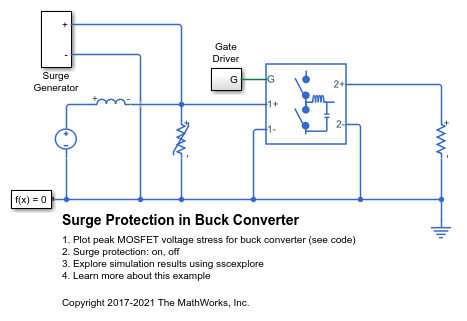
变阻器如何应用于降压转换器,以便由于差动浪涌保护开关MOSFET免受过电压。
如何参数化Simscape™Electrical™二极管以表示瞬态电压抑制(TVS)二极管。这个例子是一个TVS二极管,适用于保护汽车电子免受与关闭感应负载相关的电压瞬变。要查看从数据表中提取的数据,在“设置”部分的“建模”选项卡上,单击“模型设置>模型属性”。在Callbacks选项卡上,单击PreLoadFcn。
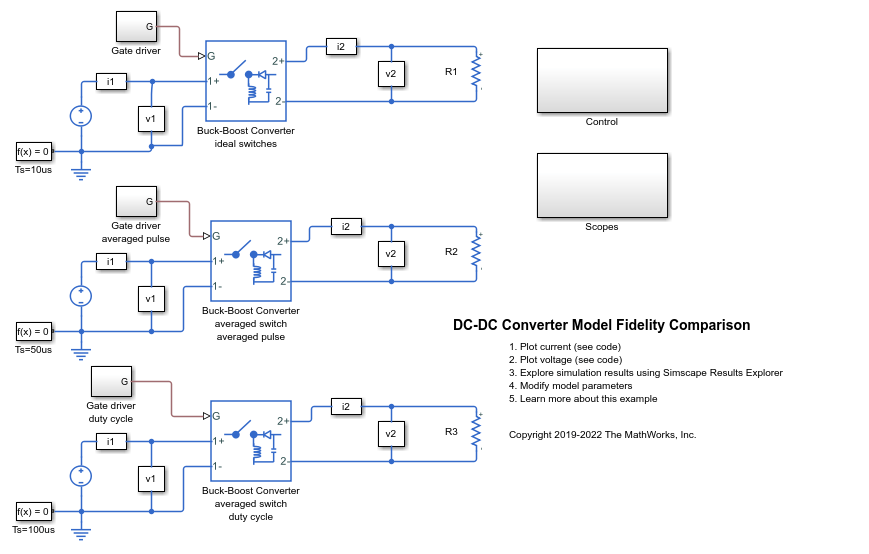
在DC-DC转换器中使用不同级别的保真度。该系统包含三个降压升压转换器。顶部转换器使用理想的开关在10 US的示例中。为了产生准确的结果,即使在50 US的采样时间在采样时间被采样,中间转换器使用平均脉冲的平均开关。为了进一步提高采样率并作为理想的平均转换器操作,底部转换器使用平均开关和占空比而不是栅极脉冲。控制子系统包含PWM发生器。范围子系统包含允许您查看模拟结果的范围块。
在斩波器转换器中使用不同级别的保真度。该系统包含三个四象限的斩波器。顶部转换器使用理想的交换机在10 000的示例中。为了产生精确的结果,即使在50 US的采样时间在50 US上采样模型,中间斩波器使用平均开关具有平均脉冲。为了进一步提高采样率并作为理想的平均斩波器操作,底部转换器使用平均开关和占空比而不是栅极脉冲。控制子系统包含PWM发生器。范围子系统包含允许您查看模拟结果的范围块。
使用Simscape™电气™进行Monte Carlo分析,以优化LLC谐振DC-DC转换器的设计,当其中一些组件具有公差。
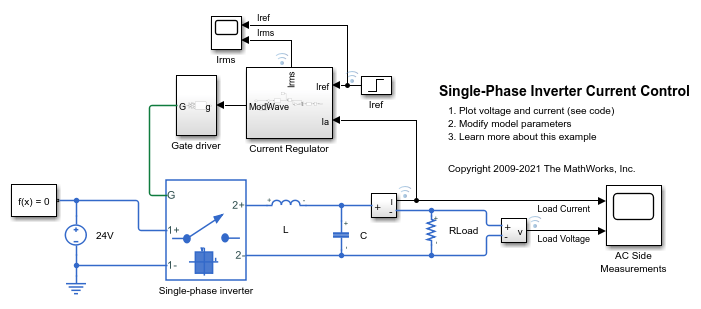
在单相逆变系统中控制电流。单相逆变器采用调制波形馈电的平均开关。这个例子适合在专用的实时仿真器上进行实时评估。
您单击了与此MATLAB命令对应的链接:
在MATLAB命令窗口中输入它来运行命令。Web浏览器不支持MATLAB命令。金宝app
选择一个网站,在那里获得翻译的内容,并看到当地的活动和优惠。根据您的位置,我们建议您选择:。
你也可以从以下列表中选择一个网站:
选择中国网站(以中文或英文)以获取最佳网站性能。其他MathWorks国家网站未优化您的位置。
联系您当地的办公室