利用动目标指示(MTI)雷达抑制地杂波
此示例显示了移动目标指示(MTI)雷达的设计,以减轻杂波并识别移动目标。对于雷达系统,杂乱指接收到的非目标环境散射回波,如陆地、海洋或雨水。杂波回波可以比目标回波大许多数量级。MTI雷达利用运动目标相对较高的多普勒频率来抑制杂波回波,而杂波回波通常是零或非常低的多普勒频率。
典型的MTI雷达使用高通滤波器去除低多普勒频率下的能量。由于FIR高通滤波器的频率响应是周期性的,因此也会去除高多普勒频率下的一些能量。因此,这些高多普勒频率下的目标将无法被雷达检测到。此问题称为盲速度问题。此示例显示如何使用称为交错PRFs的技术来解决盲速度问题。
构建雷达系统
首先,定义雷达系统的组成部分。本示例的重点是MTI处理,因此我们将使用示例中构建的雷达系统雷达接收机模拟测试信号. 我们鼓励读者探索这本书的细节雷达系统设计通过这个例子。将天线高度更改为100米,以模拟安装在建筑物顶部的雷达。请注意,系统中的PRF约为30 kHz,对应于5 km的最大无歧义范围。
负载基本经济数据;sensorheight = 100;sensormotion。初始位置= [0 0 sensorheight]';脉冲重复频率= waveform.PRF;
检索采样频率、工作频率和传播速度。
fs = waveform.SampleRate;fc = radiator.OperatingFrequency;wavespeed = radiator.PropagationSpeed;
在许多MTI系统中,尤其是低端MTI系统,发射机的电源是磁控管。因此,发射机向每个发射脉冲添加随机相位。因此,通常需要在接收机处恢复相干性。这种设置称为相干在接收.在这些系统中,接收器锁定在发射器为每个脉冲添加的随机相位上。然后,接收机将在相应脉冲间隔内接收到的接收样本的相位影响去除。我们可以通过设置发射器和接收器来模拟接收系统上的相干:
传送器.CoherentTransmist=假;变送器.PhaseNoiseOutputPort=真;receiver.PhaseNoiseInputPort=真;
确定目标
接下来,定义两个移动目标。
第一个目标位于位置[1600 0 1300]。根据前面所示的雷达位置,它与雷达的距离为2公里。目标的速度为[100 80 0],对应的相对于雷达的径向速度为-80 m/s。目标的雷达横截面为25平方米。
第二个目标位于位置[2900 800],与距离雷达3 km的距离相对应。将此目标的速度设置为盲速度,其中目标的多普勒信号与脉冲重复频率混叠。此设置防止MTI雷达检测到目标。我们使用dop2speed()函数用于计算盲速度,该速度对应的多普勒频率等于脉冲重复频率。
波长= wavespeed / fc;blindspd = dop2speed(脉冲重复频率,波长)/ 2;%半价补偿往返tgtpos=[1600 0 1300],[2900 800];tgtvel=[100 80 0],[-blindspd 0 0];tgtmotion=phased.Platform(“初始位置”,tgtpos,“速度”,tgtvel);tgtrcs=[25];目标=相位。雷达目标(“MeanRCS”,tgtrcs,“工作频率”、fc);
杂乱
杂波信号是使用最简单的杂波模型(恒定伽马模型)生成的,伽马值设置为-20 dB。这种伽马值是平地杂波的典型值。假设杂波片存在于所有范围,每个杂波片的方位角宽度为10度。还假设雷达的主波束指向水平面注意雷达没有移动。
trgamma = surfacegamma (“平地”);混乱= constantGammaClutter (“传感器”、天线、...“传播速度”散热器。PropagationSpeed,...“工作频率”,散热器。工作频率,...“采样器”波形。SampleRate,“传输信号输入端口”,真的,...脉冲重复频率的,waveform.PRF,“伽马”trgamma,“PlatformHeight”,传感器高度,...“平台速度”,0,“PlatformDirection”,[0;0],...“登山角”(0 0 0),“ClutterMaxRange”,5000,...“杂波方位角扫描”,360,“Patchazimutspan”10...“种子源”,“财产”,“种子”, 2011);
模拟接收脉冲和匹配滤波器
现在我们为之前定义的雷达和目标模拟10个接收脉冲。
脉冲数=10;%将接收器的种子设置为复制结果接收器。SeedSource =“财产”;receiver.Seed=2010;rxPulse=helpermtimulate(波形、发射机、接收机、,...散热器、集热器、传感器运动、,...目标,tgtmotion,杂乱,pulsenum);
然后,我们将接收到的信号通过匹配滤波器。
matchingcoeff=getMatchedFilter(波形);matchedfilter=phased.matchedfilter(“系数”, matchingcoeff);mfiltOut = matchedfilter (rxPulse);matchingdelay =大小(matchingcoeff, 1) 1;mfiltOut =缓冲区(mfiltOut (matchingdelay + 1:结束),大小(mfiltOut, 1));
使用三脉冲消除器执行MTI处理
MTI处理使用MTI滤波器去除慢时间序列中的低频成分。由于地杂波通常是不移动的,去除低频成分可以有效地抑制地杂波。三脉冲对消器是一种常用的、简单的MTI滤波器。抵消器是一个滤波器系数为[1 -2 1]的全零FIR滤波器。
H = [1 -2 1];mfiltOut mtiseq =过滤器(h, 1日,[],2);
使用非相干脉冲积分来组合慢时间序列。排除前两个脉冲,因为它们处于MTI滤波器的瞬态周期。
mtiseq = pulsint (mtiseq(:, 3:结束));%为了进行比较,还需要对匹配的滤波器输出进行积分mfiltOut = pulsint (mfiltOut(:, 3:结束));
%计算每个快速时间采样的范围快速时间网格=(0:size(mfiltOut,1)-1)/fs;rangeidx=波速*快速时间网格/2;%再次绘制接收到的脉冲能量范围情节(rangeidx pow2db (mfiltOut。^ 2),“r——”,...rangeidx,pow2db(mtiseq.^2),“b-”);网格在…上;头衔(“使用统一PRF的快速时间序列”);包含(的范围(m));ylabel (“权力(dB)”);传奇(在MTI滤波器的,“在MTI过滤器之后”);

回想一下,有两个目标(在2公里和3公里处)。在MTI滤波之前,两个目标都被掩埋在杂波回波中。100米处的峰值是从雷达正下方地面直接返回的路径。请注意,功率随着范围的增加而降低,这是由于信号传播损耗造成的。
MTI滤波后,除直接路径峰值外,大部分杂波回波都被去除。噪声地板现在不再是距离的函数,因此噪声现在是接收机噪声而不是杂波噪声。这一变化显示了三脉冲消除器的杂波抑制能力。在2公里范围内,我们看到一个代表第一个目标的峰值。但是,在3 km范围内没有代表第二个目标的峰值。峰值消失是因为三脉冲消除器抑制了以消除器盲速移动的第二个目标。
为了更好地理解盲速度问题,让我们看看三脉冲消除器的频率响应。
f = linspace(0,脉冲重复频率* 9,1000);hresp = freqz (h 1 f,脉冲重复频率);情节(f / 1000, 20 * log10 (abs (hresp)));网格在…上;xlabel(“多普勒频率(kHz)”);ylabel (‘震级(dB)’);头衔(“三脉冲消除器的频率响应”);

注意频率响应中反复出现的零点。零点对应于盲速度的多普勒频率。具有这些多普勒频率的目标被三脉冲消除器抵消。图中显示零点出现在PRF的整数倍处(约30kHz,60kHz,…)。如果我们能够消除这些零点或将它们从雷达规范的多普勒频率区域推离,我们就可以避免盲速问题。
使用交错prf模拟接收脉冲
盲速度问题的一个解决方案是使用非均匀PRF或交错PRF。相邻脉冲以不同的脉冲重复频率传输。这种配置将盲速度的下限推到更高的值。为了说明这一想法,我们将使用两个交错PRF,并绘制三个脉冲的频率响应lse消除器。
让我们在25kHz左右选择第二个PRF,这对应的最大明确范围是6公里。
脉冲重复频率= wavespeed。/ (2 * (6000 5000));计算三脉冲抵消器的幅频响应pf1=@(f)(1-2*exp(1j*2*pi/prf(1)*f)+exp(1j*2*pi*2/prf(1)*f));pf2=@(f)(1-2*exp(1j*2*pi/prf(2)*f)+exp(1j*2*pi*2/prf(2)*f));sfq=(abs(pf1(f))。^2+abs(pf2(f))。^2)/2;%绘制频率响应曲线持有在…上;情节(f / 1000, pow2db (sfq),“r——”);ylim ([-50, 30]);传奇(统一的编码脉冲的,“2-交错PRF”);

从交错PRF的图中我们可以看到,第一个盲速对应的多普勒频率为150 kHz,比均匀PRF的情况大5倍。这样,具有30 kHz多普勒频率的目标将不会被抑制。
现在,使用交错PRF模拟来自目标的反射信号。
%分配新的PRF释放(波形);波形.PRF=PRF;释放(杂波);杂波.PRF=PRF;%重置噪声种子发布(接收者);接收者.Seed=2010;%重置平台位置复位(传感器运动);复位(tgtmotion);%模拟目标收益rxPulse=帮助器模拟(波形、发射机、接收机、,...散热器、集热器、传感器运动、,...目标,tgtmotion,杂乱,pulsenum);
对交错prf执行MTI处理
我们像以前一样处理脉冲,首先通过匹配滤波器,然后对脉冲进行非相干积分。
mfiltOut = matchedfilter (rxPulse);%使用相同的三脉冲消除器来抑制杂波。mfiltOut mtiseq =过滤器(h, 1日,[],2);%不相干的集成mtiseq = pulsint (mtiseq(:, 3:结束));mfiltOut = pulsint (mfiltOut(:, 3:结束));%计算每个快速时间采样的范围快速时间网格=(0:size(mfiltOut,1)-1)/fs;rangeidx=波速*快速时间网格/2;%绘制快速时间序列与范围。clf;情节(rangeidx pow2db (mfiltOut。^ 2),“r——”,...rangeidx,pow2db(mtiseq.^2),“b-”);网格在…上;头衔(“使用交错PRF的快速时间序列”);包含(的范围(m));ylabel (“权力(dB)”);传奇(在MTI滤波器的,“在MTI过滤器之后”);
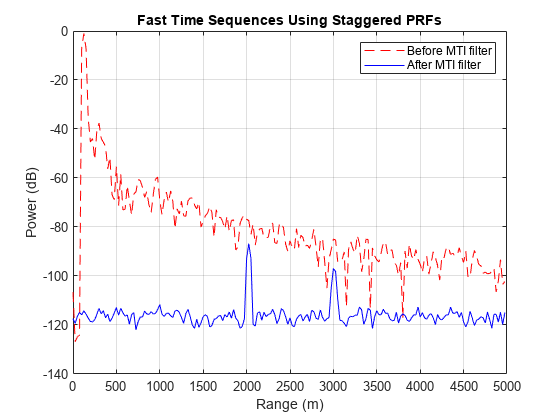
图中显示,经过MTI滤波后,两个目标现在都可以检测到,杂波也被消除。
总结
通过非常简单的操作,MTI处理可以有效地抑制低速杂波。均匀的PRF波形将在盲速下错过目标,但这个问题可以通过使用交错PRF来解决。对于具有宽频谱的杂波,MTI处理可能很差。这种类型的杂波可以通过时空自适应处理加以抑制。参见示例时空适应处理导论详情请参阅。
附录
参考文献:马克·理查兹,雷达信号处理基础,麦格劳·希尔,2005年。
您还可以从以下列表中选择网站: