多路径环境下宽带单站雷达建模
这个例子展示了如何模拟一个宽带雷达系统。当一个雷达系统的带宽超过系统中心频率的5%时,它通常被认为是宽带系统。对于本例,将使用10%的带宽。
案例探究
本例扩展了研究中所探索的窄带单站雷达系统在Simulink中模拟雷达接收机测试信号金宝app通过修改实例进行宽带雷达仿真。对于宽带信号,传播损耗和目标RCS在系统带宽上都可能有很大的变化。正是由于这个原因,窄带模型不能被使用,因为它们只能在一个频率上模拟传播和目标反射。相反,宽带模型将系统的带宽划分为多个子带。然后,每个子带被建模为一个窄带信号,每个子带内的接收信号被重新组合,以确定整个系统带宽的响应。
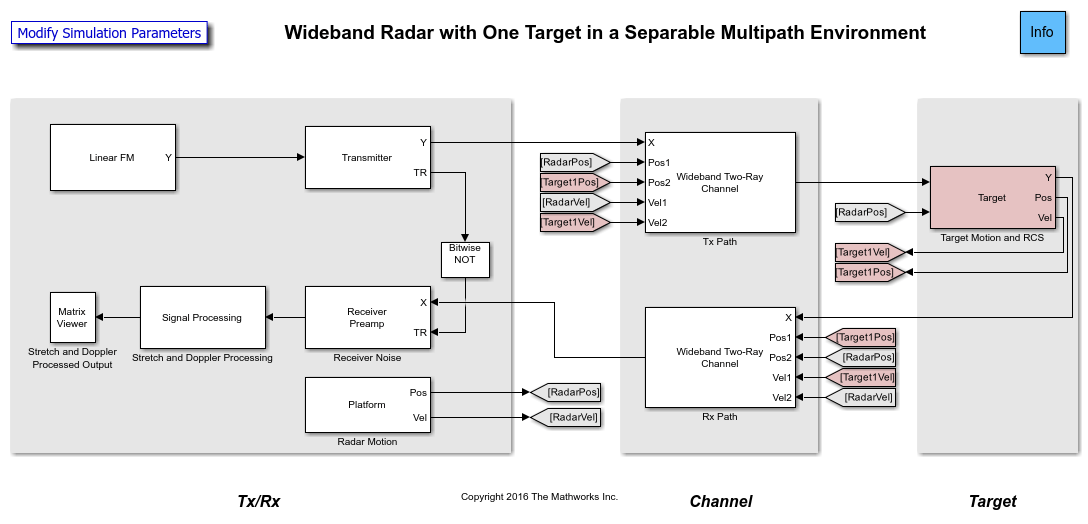
该模型由收发器、信道和目标组成。对应于模型的每个部分的块是:
收发器
线性调频-创建线性调频脉冲。发射机-放大脉冲并发送发送/接收状态到接收机前置放大器块,以指示它是否正在传输。接收机前置放大器-当发射器关闭时,接收传播的脉冲。这个块也给信号增加了噪声。平台-用于模拟雷达的运动。信号处理-子系统执行拉伸处理、多普勒处理和噪声底估计。矩阵查看器-显示处理脉冲作为测量范围、径向速度和估计信号功率对干扰加噪声功率比(SINR)的函数。
信号处理子系统

拉伸处理器-通过将接收信号与延迟到选定参考范围的发射线性调频波形混合在模拟域中,对接收信号进行解调。关于拉伸处理的更详细的讨论可在FMCW距离估计的例子。杀害多人者子系统对模数转换器(ADC)的采样率进行建模,方法是根据伸缩处理器中选择的范围跨度所需的带宽降低模拟的采样率。缓冲CPI—子系统收集多个脉冲重复间隔(PRIs),形成一个相干处理间隔(CPI),通过多普勒处理实现径向速度估计。Range-Doppler响应-沿距离和多普勒尺寸计算dft,以估计接收脉冲的距离和径向速度。Ca cfar 2d-在距离和多普勒范围内使用细胞平均(CA)方法估计接收信号的噪声底。计算SINR子系统使用CFAR探测器的计算阈值对接收到的信号进行归一化,返回以分贝(dB)为单位的估计SINR。
通道
宽带双线-将传播延迟、损耗、多普勒频移和平坦地面上的多径反射应用到脉冲上。一块用于传输脉冲,另一块用于反射脉冲。的宽带双线方块需要雷达和目标的位置和速度。这些都是使用转到而且从块。
目标子系统
的目标分系统对目标的运动进行建模,并根据宽带RCS模型和呈现给雷达的目标纵横角对脉冲进行反射。在本例中,目标位于距离宽带雷达3000米的位置,并以100米/秒的速度远离雷达。

平台-用于模拟目标的运动。目标的位置和速度值由宽带双射线信道块对模型的传播并由角范围块来计算信号在目标位置的入射角。角范围-计算传播信号在目标位置的方位角和仰角的入射角。宽带后向散射目标-模拟目标对入射脉冲的宽带反射。介绍了扩展宽带目标模型目标雷达截面建模本模拟使用示例。
探索模式
该模型的几个对话框参数由助手函数计算helperslexWidebandMonostaticRadarParam.要从模型中打开函数,请单击修改仿真参数块。该函数在加载模型时执行一次。它向工作区导出一个结构,该结构的字段由对话框引用。要修改任何参数,要么在命令提示符处更改结构中的值,要么编辑helper函数并重新运行它以更新参数结构。
结果和显示
下图显示了目标的距离和径向速度。目标距离由反射脉冲的往返延迟计算。目标的径向速度通过使用DFT来比较接收到的目标在相干脉冲间隔(CPI)上返回的相位序列来估计。从拉伸峰值和多普勒处理输出测量目标的距离和径向速度。

尽管在这个示例中只建模了一个目标,但是在图的右上角可以观察到三个目标返回。沿发射和接收路径的多路径反射产生第二个和第三个目标回波,通常分别称为单弹和双弹回波。根据仿真参数计算出目标的期望距离和径向速度。
tgtRange = rangeangle(paramWidebandRadar.targetPos,...paramWidebandRadar.sensorPos)
tgtRange = 3000
tgtSpeed =径向速度(...paramWidebandRadar.targetPos paramWidebandRadar.targetVel,...paramWidebandRadar.sensorPos paramWidebandRadar.sensorVel)
tgtSpeed = -100
这一预期距离和径向速度与上图中的模拟结果一致。
还可以找到多路径返回之间的预期分离。下图说明了视距 反射路径
反射路径 几何图形。
几何图形。

为本次仿真建模的几何参数定义如下。
zr = paramWidebandRadar.targetPos(3);zs = paramWidebandRadar.sensorPos(3);Rlos = tgtRange;
这些路径的长度很容易得到。




利用这些结果,可以计算出反射路径范围。
L =√(Rlos^2-(zr-zs)^2);Rrp =√((zs+zr)^2+L^2)
Rrp = 3.0067e+03
对于单静态系统,单次反弹返回可以穿过两条不同的路径。
雷达
 目标
目标 雷达
雷达雷达
目标雷达


在这两种情况下,雷达将观测到相同的范围。

然后发现所有多路径返回值之间的距离是观测范围和视线范围之间的差值。

Rdelta = (Rrp-Rlos)/2
Rdelta = 3.3296
这与模拟结果中观察到的多径距离分离相吻合。
总结
该示例演示了如何在Simulink®中对端到端宽带雷达系统进行建模。金宝app传播损耗和目标RCS在系统带宽上的变化需要使用宽带传播和目标模型。
计算接收目标回波的信噪比(SINR)Ca cfar 2d块。CFAR估计器使用cell-averaging来估计目标回波附近的噪声和干扰功率,从而计算接收信号的SINR。
对象在多路径环境中建模宽带双射线信道,这导致雷达观测到三次目标返回。这些返回值对应于与单稳态雷达和目标之间的双向信号传播相关的视距、单弹和双弹路径。多径回程在范围内的模拟分离表明,与从建模几何计算的预期分离相匹配。
您也可以从以下列表中选择一个网站: