模拟双偏振雷达
这个例子展示了如何模拟一个偏振双基地雷达系统评估的范围和速度的目标。发射机、接收机和目标运动学考虑在内。有关极化建模功能的更多信息,请参阅建模和分析极化。
系统设置
300 MHz的系统运行,使用一个线性调频波形的最大明确的范围是48公里。决议是50米范围和时间带宽积是20。
maxrng = 48 e3;%最大射程rngres = 50;%距离分辨率tbprod = 20;%时间带宽积
发射机的峰值功率2千瓦和20 dB的增益。接收方还提供了一个20 dB的增益和噪声带宽是一样的扫描波形的带宽。
传输天线阵列是一个静止的研制出均匀线性Arra (ULA)”位于原点。数组是由垂直偶极子。
txAntenna = phased.ShortDipoleAntennaElement (“AxisDirection”,“Z”);(波形,发射机,txmotion散热器)=…helperBistatTxSetup (maxrng rngres、tbprod txAntenna);
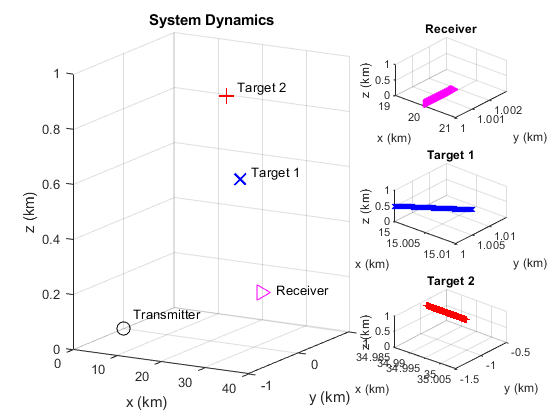
接收天线阵也研制出齿龈。它位于(20000;1000;100)米距离传输天线和移动的速度(0;20;0)m / s。假设接收数组中的元素也垂直偶极子。接收天线阵的所以它的侧向分回传输天线。
rxAntenna = phased.ShortDipoleAntennaElement (“AxisDirection”,“Z”);[收集器,接收机,rxmotion、rngdopresp beamformer] =…helperBistatRxSetup (rngres rxAntenna);
有两个目标在空间。第一个是一个点目标建模为一个球体;它保留的极化状态事件信号。它位于(15000;1000;500)米距离传送阵和移动的速度(100;100;0)m / s。
第二个目标是位于(35000;-1000;1000)米距离传送阵和接近的速度(-160;0;-50)m / s。不同于第一个目标,第二个目标的偏振状态翻转事件信号,这意味着水平极化组件的输入信号变为垂直极化组件的输出信号,反之亦然。
(目标,tgtmotion txchannel rxchannel] =…helperBistatTargetSetup (waveform.SampleRate);
一个单一的散射矩阵是一个相当简单的偏振模式的目标。它假设无论入射和反射方向是什么,H之间的权力分配和V组件是固定的。然而,即使是这样一个简单的模型可以揭示复杂目标行为的模拟,因为首先H和V方向变化对不同入射和反射的方向;其次,目标的方向,定义的局部坐标系,也影响极化匹配。
系统仿真
下一节模拟256收到脉冲。接收数组beamformed向两个目标。第一个图中显示系统设置和接收阵列和如何移动的目标。第二个图显示生成range-Doppler地图每64个脉冲在接收机接收数组。
Nblock = 64;%释放量dt = 1 / waveform.PRF;复杂(y = 0(圆(waveform.SampleRate * dt), Nblock));hPlots = helperBistatViewSetup (txmotion rxmotion tgtmotion,波形,…rngdopresp y);Npulse = Nblock * 4;为m = 1: Npulse%更新职位的发射机,接收机,和目标[传真照片,tvel txax] = txmotion (dt);[rpo, rvel rxax] = rxmotion (dt);[tgtp, tgtv tgtax] = tgtmotion (dt);%计算目标角度所看到的发射机[txrng, radang] = rangeangle(传真照片,tgtp txax);%模拟脉冲的传播方向目标wav =波形();wav =发射机(wav);sigtx =散热器(wav, radang, txax);sigtx = txchannel (sigtx传真照片,tgtp tvel, tgtv);%反射脉冲的目标为n = 2: 1:1%计算每个目标双基地向前和向后的角度[~,fwang] = rangeangle(传真照片,tgtp (:, n), tgtax (:,:, n));[rxrng (n), bckang] = rangeangle (rpo, tgtp (:, n), tgtax (:,:, n));sigtgt (n) =目标{n} (sigtx (n), fwang, bckang, tgtax (:,:, n));结束%接收路径传播rpo, sigrx = rxchannel (sigtgt tgtp tgtv, rvel);[~,inang] = rangeangle (rpo, tgtp rxax);传真照片,rspeed_t = radialspeed (tgtp tgtv tvel);rpo, rspeed_r = radialspeed (tgtp tgtv rvel);%在收发分置的接收机接收目标的回报sigrx =收集器(sigrx inang rxax);yc = beamformer (sigrx inang);y(:,国防部(m - 1, Nblock) + 1) =接收机(sum (yc, 2));helperBistatViewTrajectory (hPlots传真照片,rpo, tgtp);如果~ rem (m, Nblock) rd_rng = (txrng + rxrng) / 2;rd_speed = rspeed_t + rspeed_r;helperBistatViewSignal (hPlots波形,rngdopresp y rd_rng,…rd_speed)结束结束
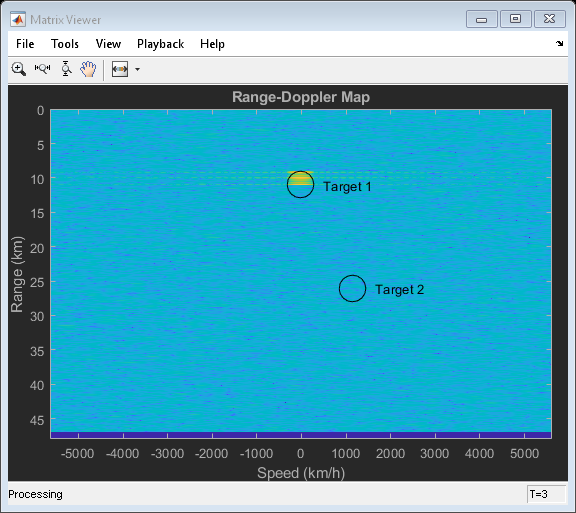
range-Doppler地图只显示返回的第一个目标。这可能是毫不奇怪因为传输和接收阵列垂直偏振,第二个目标地图水平极化波的垂直极化波。接收信号的第二个目标是正交的偏振接收数组导致明显的极化损失。
您可能还注意到由此产生的距离和径向速度不同意目标的距离和径向速度相对于发射机。这是因为在收发分置的配置中,估计范围实际上是目标的几何平均范围相对于发射机和接收机。同样,估计目标的径向速度和径向速度相对于发射机和接收机。圆在地图显示目标应该出现在range-Doppler地图。需要进一步处理识别目标的确切位置,但这超出了这个例子的范围。
使用圆偏振接收数组
垂直偶极子是一个非常受欢迎的选择传输天线在真实的应用程序中,因为它是低成本的,全方位的模式。然而,前面的仿真表明,如果使用相同的天线接收器,系统有可能会错过某些目标。因此,线性极化天线通常不是最好的选择等的接收天线配置,因为无论如何对齐线偏振,总是存在一个正交极化。青鸾的反射信号偏振状态接近那个方向,极化损失变大。
解决这个问题的一个方法是使用圆极化天线在接收端。圆极化天线不能完全匹配任何线性极化。但另一方面,圆极化天线之间的极化损失和线性偏振信号3 dB,无论哪个方向的线性极化。因此,尽管它从未给最大回报,它从不错过目标。常用与圆极化天线是一种交叉偶极子天线。
下一节将展示当交叉偶极子天线是用来接收阵列形式。
rxAntenna = phased.CrossedDipoleAntennaElement;收集器=克隆(收集器);collector.Sensor。元素= rxAntenna;txmotion helperBistatSystemRun(波形,发射机,散热器,收藏家,…接收机、rxmotion rngdopresp beamformer,目标,tgtmotion, txchannel,…rxchannel、hPlots Nblock Npulse);
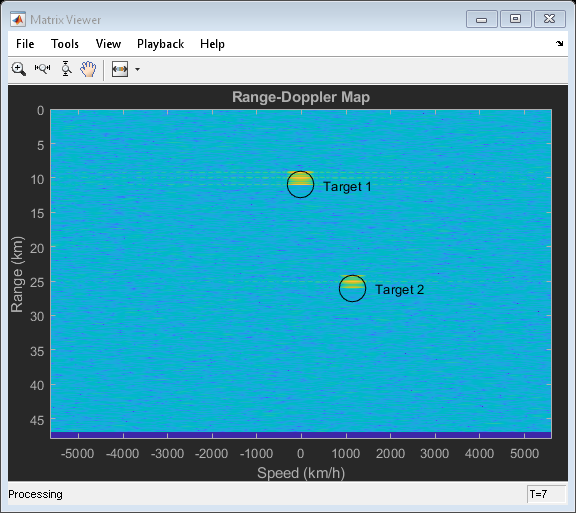
range-Doppler地图现在显示两个目标在正确的位置上。
总结
这个例子显示了一个双偏振雷达的系统级仿真。示例生成range-Doppler地图不同的传输和接收阵列接收信号的偏振配置和显示了圆极化天线可以用来避免失去线性极化信号由于目标的极化散射特性。