带LIDAR传感器的差动轮式机器人
VRCollisionS_LIDAR示例显示了LinePickSensor如何用于在Simulink®3D动画™中为LIDAR传感器行为进行建模。金宝app
在一个简单的虚拟世界中,定义了一个带有LIDAR传感器的轮式机器人安装在其顶部。使用LinePickSensor实现此激光雷达传感器,可通过检测具有周围的场景对象的几个光线(建模为索引模型)的冲突。传感器挑选范围和采摘点字段用于此模型仅用于可视化目的,但与机器人姿势信息一起,它们可用于同时定位和映射(SLAM)和其他类似的目的。
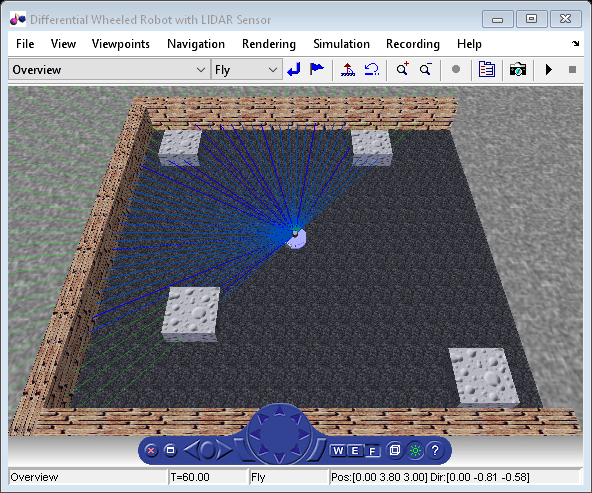
传感器传感线可见,显示为透明的绿线。在-90到90度之间的水平平面中有51个感测光线均匀间隔。激光雷达范围为10米。
为了可视化LIDAR传感器输出,有一种可视化代理线,其定义为与定义为LinePickSensor传感几何形状的线相同的线。可视化线是蓝色的。采摘点和挑选线路电视输出的组合用于可视化碰撞点。拣配点输出包含与周围物体相撞的点的坐标。此输出具有可变的大小,具体取决于碰撞的传感器射线。挑选的输出大小是固定的,等于感测光线的数量。输出返回与LIDAR传感器原点的距离,以为每个传感线的碰撞点。对于不碰撞的光线,此输出返回-1。挑选范围用于确定在拣选点传感器输出中返回碰撞点的行指数。实际上,缩短了蓝线,使得每条线仅显示光线风扇原点和碰撞点之间的线段。
机器人轨迹使用信号编辑器和斜坡块以简单的方式建模。在信号编辑器中,为仿真的前40秒定义了一个简单的1x1米方形轨迹。返回其原始位置后,机器人仅旋转无限期。
在该模型中,有与相同虚拟世界相关联的VR接收器和VR源块。VR源用于读取传感器信号。VR接收器用于设置传感器视觉代理线的端点的机器人位置/旋转和坐标。
在虚拟世界中,有几个定义了几个视点,静态和连接到机器人,允许从不同的角度观察LIDAR可视化。

您还可以从以下列表中选择一个网站: